Am Donnerstag dem 4.11. von 17:00 bis 19:30 gibt es ein Meet-Up! mit uns im Makerspace (DrePunct).
Zunächst werden wir etwas über unsere aktuellen Projekte erzählen und im Anschluss können wir in lockerer Runde über Fragen und Ideen sprechen. Wenn ihr also Interesse an unserer Arbeit habt und uns kennenlernen wollt, freuen wir uns über euren Besuch! Vielleicht habt ihr sogar selber Lust an unseren Projekten teilzunehmen.
Am Donnerstag, dem 09. September 2021 war es endlich so weit – unsere Reise zur European Rover Challenge 2021 in Kielce, Polen, sollte beginnen. Damit wir pünktlich um 13 Uhr in Polen unseren Zeitslot für Testfahrten auf dem Mars-Yard wahrnehmen konnten, begann unsere Reise schon 4 Uhr morgens.
Insgesamt 9 STARler waren mit von der Partie und verteilt auf zwei Transporter ging die Reise mit unserem Rover ELECTRA los. Gute acht Stunden und einige Zwischenstopps später hatten wir unser Ziel – die Kielce University of Technology – erreicht. Dort angekommen, machten wir uns zuerst einmal auf den Weg zum Marsyard, um unser zukünftiges Missionsgelände etwas näher unter die Lupe zu nehmen.
Image made by ERC2021
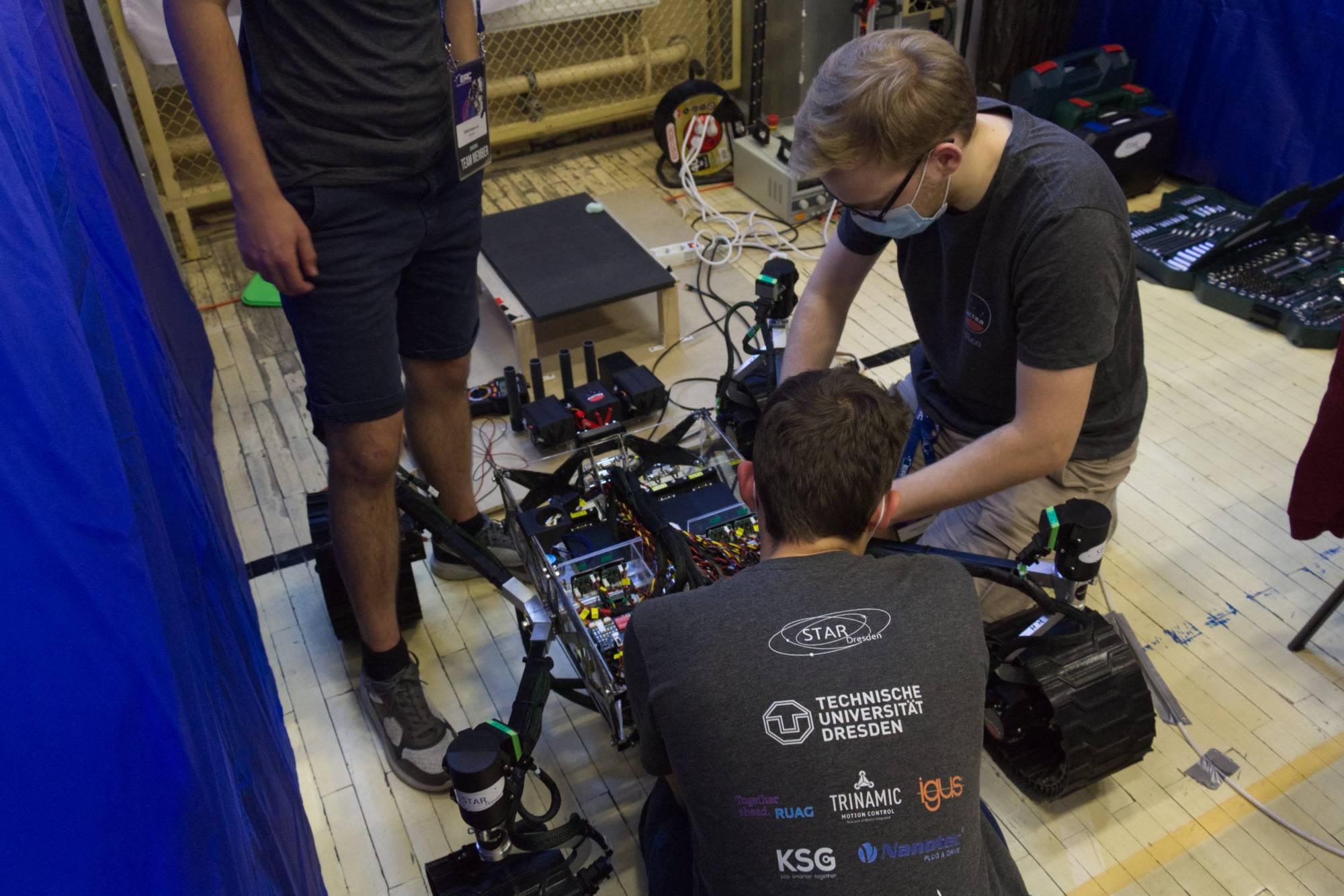
Nach einer kurzen Besichtigung und ersten Kontakten zu anderen Teams machten wir uns auf den Weg in die Teamzone. Dort bekommt jedes Team einen abgesteckten Bereich zugesprochen, in dem es an seinem Rover arbeiten kann. Für uns galt nun, alles Werkzeug auspacken und den Rover fahrtüchtig machen!
Kurze Zeit später stellte sich leider heraus, dass der Marsyard nicht zugänglich sein wird, weswegen wir die Zeit genutzt haben, um Fehler zu beheben und uns auf unsere erste Aufgabe am Freitag vorzubereiten. Gegen 20 Uhr machten wir uns dann auf den Weg zu unserer Unterkunft – ein Airbnb Haus etwa 20 Minuten außerhalb von Kielce.
Tag zwei begann wieder viel zu früh, da um kurz nach 7 Uhr direkt eine Morgenbesprechung mit allen Teamleitern angesetzt war.
Unser weiterer Tagesplan sah um 16 Uhr den sogenannten Mega Task vor. Hierbei werden drei der vier technischen Aufgaben in einem Task gebündelt und das Team hat eine Stunde Zeit, um diese zu absolvieren. Im Detail muss der Rover dabei (nach Möglichkeit autonom) bestimmte Wegpunkte anfahren, Bilder für die wissenschaftliche Mission und von unerwarteten Gegenständen machen und Mess-Sonden verteilen und wieder einsammeln.
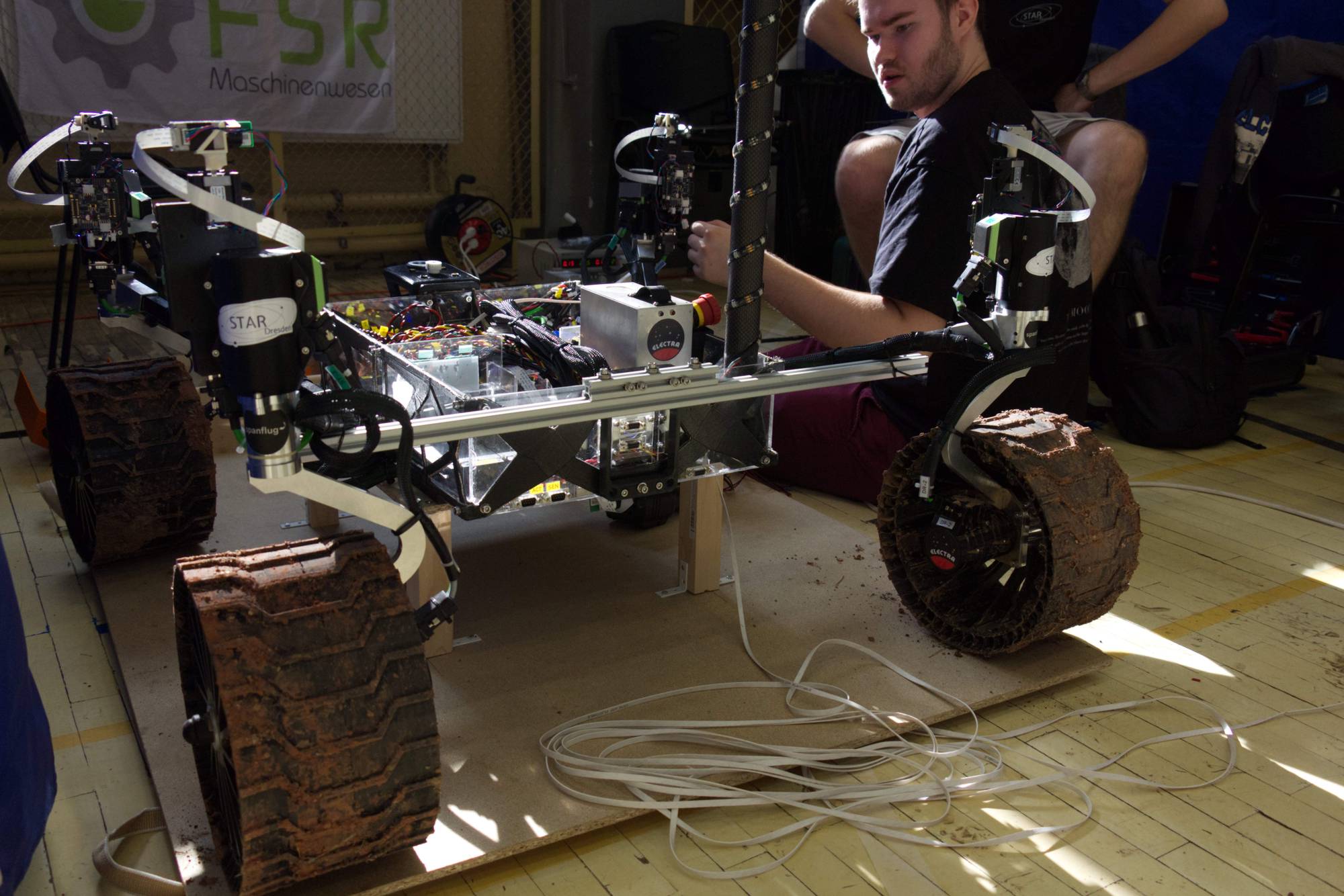
Aufgrund technischer Schwierigkeiten – das Differentialgetriebe konnte nicht das Gewicht von Arm und Bohrer tragen – mussten wir allerdings auf unseren robotischen Arm und den Bohrturm am Rover verzichten. Deshalb blieb nichts anderes übrig, als uns bei dieser Aufgabe auf die Navigation und das Aufnehmen von Bildern zu beschränken. An der Startlinie angekommen, haben wir unsere Bodenstation im Zelt eingerichtet und uns mental auf die kommende Aufgabe vorbereitet.
Unser Rover Operator (Arno, 3. v.l., Bild oben) wurde dabei unterstützt von Jonas an der Telemetrie Station (ganz links), Alex G. an der Bodenstation (2. v.l.), Lucas als Navigator (2. v.r.) und Benjamin als Videooperator (rechts).
Der Rover selbst wurde von Alex K. (1. v.l., Bild unten) und Rico (2. v.l.) begleitet, um im Notfall schlimmeres zu verhindern, da die Teams an der Bodenstation keinen direkten Sichtkontakt zum Rover haben.
Bei dieser Aufgabe konnten wir die hervorragende Mobilität und Geländegängigkeit von ELECTRA unter Beweis stellen. Kein Hindernis war zu groß und mit durchgehend perfektem Bodenkontakt, dank Differential-Aufhängung, konnten wir selbst auf unebenem Untergrund mühelos fahren. Was uns während der Mission allerdings einen Strich durch die Rechnung machte, war die etwas lockere Halterung der Batterien. So bestand bei jedem Hindernis die Gefahr, dass eine Batterie rausspringt und die Verbindung zur Bodenstation abreißt. Einige Minuten nach Start geschah leider auch genau das und während für die Bodenstation nur die Verbindung kurz weg war, fuhr unser Rover in diesem Moment einen kleinen Kreis. Da der Kontakt mit den Kameras wieder hergestellt war, nachdem ELECTRA genau eine volle Runde gefahren war, war dem Team an der Bodenstation nicht bewusst, was gerade passiert war. Dazu muss erwähnt werden, dass zu diesem Zeitpunkt niemand im Team ahnte, dass ELECTRA einfach weiter fährt, wenn keine Verbindung mit der Bodenstation besteht. Das Außenteam hatte deswegen ernsthafte Zweifel an unserem kleinen (unfreiwilligen) Manöver mit der Annahme, dass alle Bewegungen des Rovers bewusst gesteuert werden. Nichts-desto trotz hatten wir den ersten Wegpunkt perfekt erreicht und steuerten nun den zweiten von insgesamt vier an! Und wie es so schön heißt, “Erst hatten wir kein Glück und dann kam auch noch Pech hinzu.”, passierte das gleiche Malheur kurz darauf noch einmal. Allerdings fuhr der Rover diesmal geradeaus weiter und die Verbindung baute sich nicht wieder von alleine auf. Unser Elektrotechniker ahnte inzwischen, dass die Batterien vermutlich etwas locker saßen und so wurde er – bewaffnet mit einer Rolle Panzertape – zum Rover geschickt, um das Problem zu beheben. Diese Aktion hat uns zwar wertvolle Punkte gekostet, allerdings war der Rover anschließend wieder funktionsfähig. Zur allgemeinen Verwunderung der Bodenstations-Crew war unser Rover allerdings an einem völlig anderen Ort, als sich die Verbindung zu den Kameras wieder herstellte. Etwa 15 m weiter, waren wir in den südlichen Krater gefahren und hatten somit unfreiwillig unseren 3. Wegpunkt erreicht. Gleichzeitig hatten wir etwas Wasser am Boden des größten Kraters gefunden, in den ELECTRA ohne Verbindung zur Bodenstation einfach hinein gerutscht war! Glück im Unglück – später haben wir erfahren, dass ein anderes Team sich auf der gleichen Route beim Hineinfahren überschlagen hat.
Im weiteren Verlauf haben wir aufgrund der bereits sehr fortgeschrittenen Zeit entschieden, die Navigationsaufgabe vorzeitig zu beenden und mit dem wissenschaftlichen Teil weiterzumachen. Im Folgenden konnten wir – neben dem Wasser – auch eine extra-terrestrische Lebensform, einen Lavatunnel und interessante Steine dokumentieren.
Damit wurde der erste Aufenthalt unseres Rovers auf dem Marsyard erfolgreich beendet. Auch wenn nicht alles geklappt, konnten wir dennoch eine Menge lernen, die Fähigkeiten unseres Rovers austesten und hatten viel Spaß, diese Mission zu planen und umzusetzen.
Um das Problem zu lösen, wurde entschieden, den Bohrer zu zerlegen und mithilfe einer der drei Alu-Profilstangen eine “Not-So-Differential-Bar” zu bauen und den Rover damit zu stabilisieren. Dadurch wurde das Differentialgetriebe blockiert und der Körper lief keine Gefahr mehr umzukippen und auf dem Boden zu schleifen. Auf diese Weise wurde zwar die Geländegängigkeit von ELECTRA “abgestellt”, welche für diese Aufgabe aber von keiner Bedeutung ist.
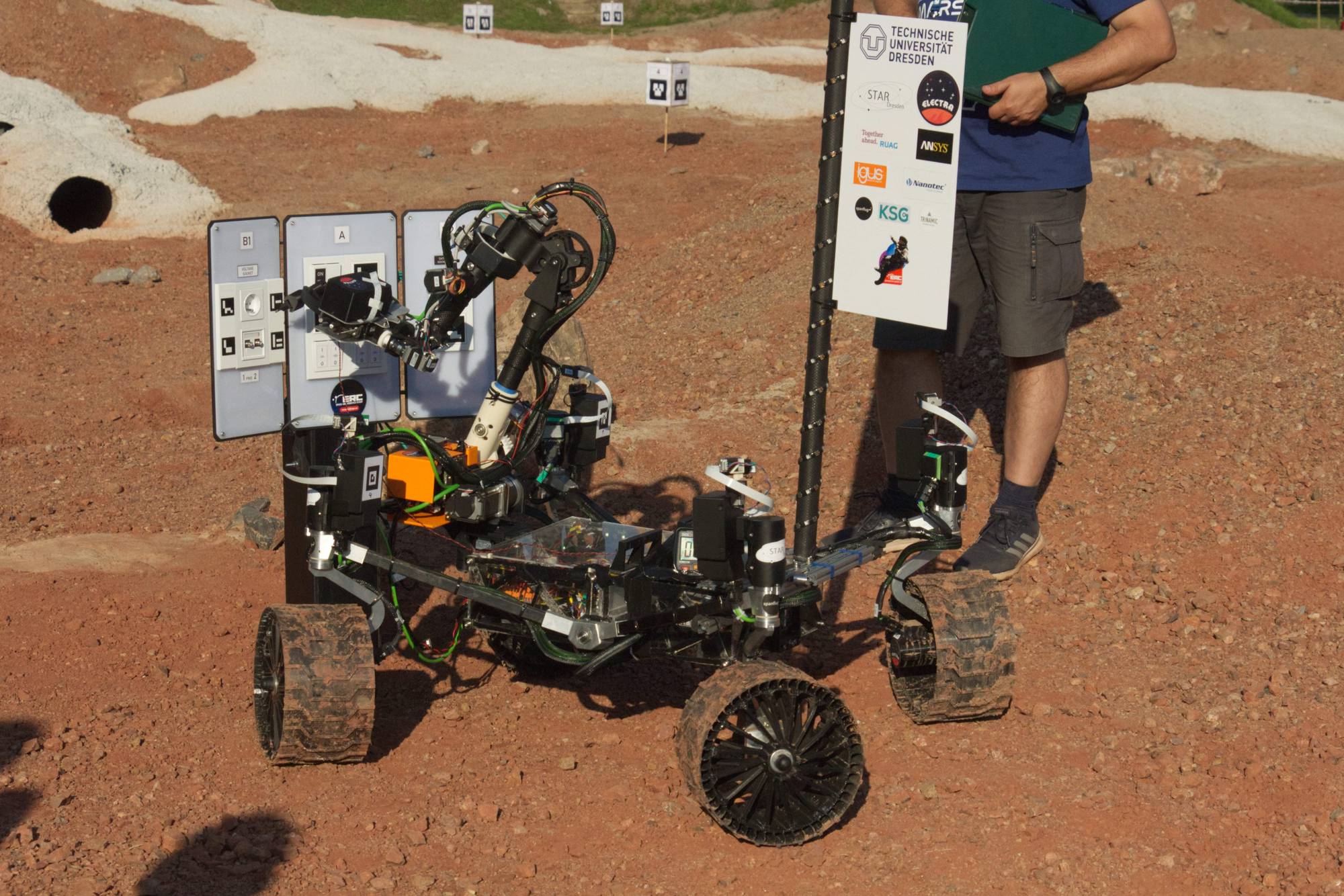
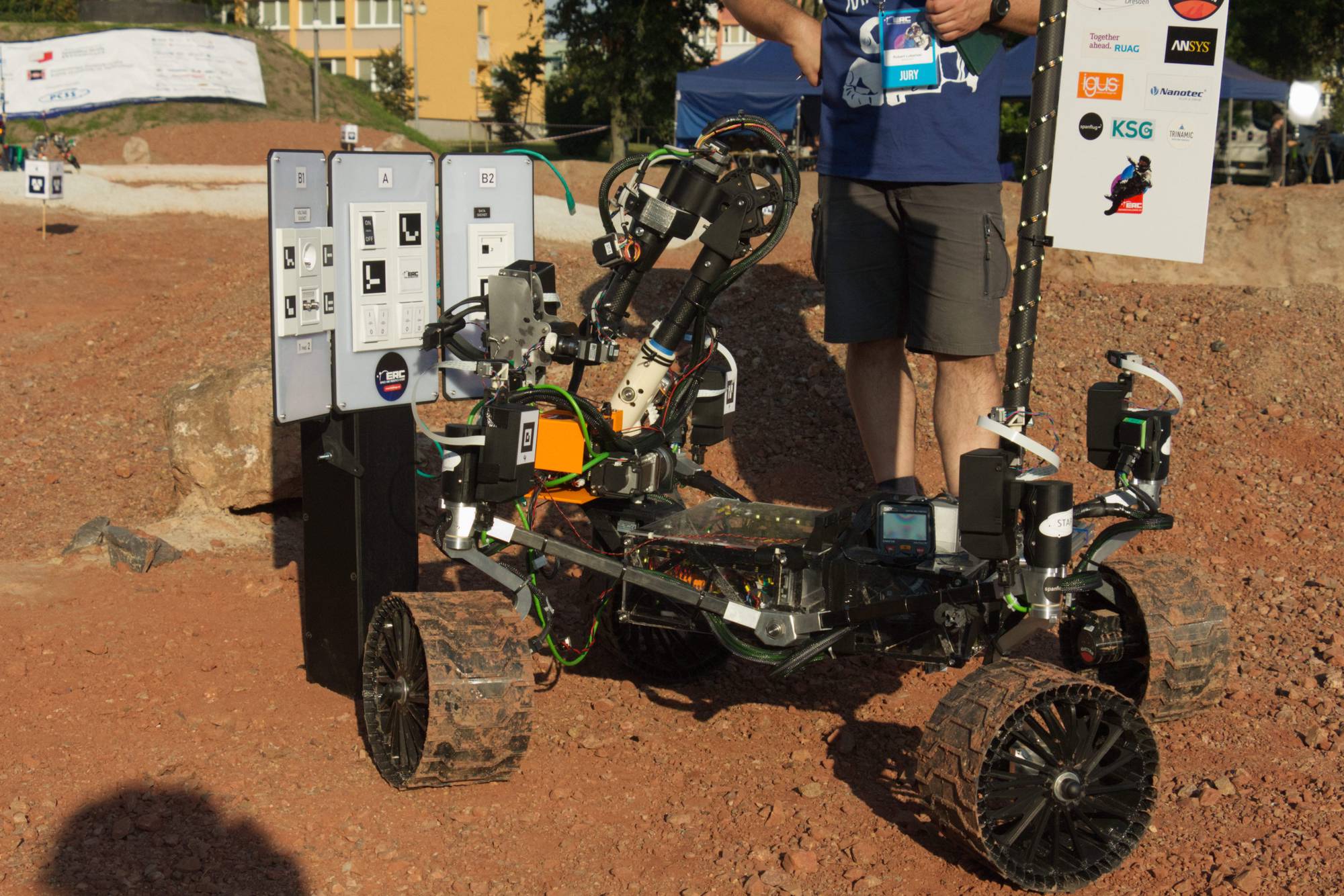
Nach den Vorbereitungen machten wir uns auf den Weg zum Marsyard, um die letzte Aufgabe zu bewältigen. Dort angekommen, bereiteten wir wieder unsere Bodenstation vor und wurden vom Kampfrichter kurz eingewiesen. Anschließend hatten wir 30 Minuten Zeit, diverse Schalter zu drücken, die Spannung in einer Steckdose zu messen und einen LAN-Stecker einzustecken.
Aufgrund mangelnder Erfahrung im Umgang mit ELECTRA’s Arm hatten wir allerdings mit diversen Problemen zu kämpfen, da die optische Tiefenwahrnehmung durch eine Kamera sehr schwierig ist und wir somit ziemlich nah vor dem Panel standen. Dadurch waren wir nicht in der Lage, den Stecker zur Messung der Spannung vernünftig einzustecken und mussten diese Teilaufgabe kurz darauf aufgeben. Im nächsten Schritt wollten wir dann die Messsonde fallen lassen, um so die Schalter besser betätigen zu können, allerdings hatten sich die Finger verkantet und die Motoren waren somit nicht in der Lage, den Greifer zu öffnen. Mit erhöhtem Schwierigkeitsgrad machten wir uns also daran, die Schalter zu drücken und konnten kurz vor Schluss tatsächlich den letzten der fünf zu drückenden Schalter umlegen!
Nach getaner Arbeit fiel eine riesige Last von uns ab, da die European Rover Challenge 2021 aus unserer Sicht abgeschlossen war. Alle Aufgaben konnten mehr oder weniger erfolgreich bewältigt werden und wir hatten ab sofort Zeit, uns mit den anderen Teams kurzzuschließen.
Am Sonntag konnten wir zum ersten Mal länger schlafen und ein gemütliches Frühstück mit frischem Obst aus dem Garten unserer Unterkunft genießen. Kurz nach dem Mittagessen war dann der Marsyard für alle Teams geöffnet, um mit ihren Rovern das Gelände zu erkunden und den Zuschauern die Möglichkeit zu geben, hautnah dabei zu sein.
Als in der darauf folgenden Siegerehrung die Preise bekannt gegeben wurden, konnten wir uns über einen starken 5. Platz in der Gesamtwertung freuen. Wir sind unheimlich stolz auf dieses Ergebnis, da ELECTRA unser erster Rover ist und wir uns in einem Bewerberfeld aus 57 Teams aus der ganzen Welt definitiv behaupten konnten. Natürlich sind wir bereits dabei, die European Rover Challenge 2022 vorzubereiten!
An dieser Stelle möchten wir uns für die Hilfe aller unserer Sponsoren und Unterstützer bedanken, ohne die dieser Erfolg und die Erfahrungen nicht möglich gewesen wären.
Vielen Dank an die TU Dresden, KSG GmbH, IGUS, NanoTec, RUAG Space Germany, Trinamics, Spanflug, dem FSR Maschinenwesen, RapidHarness und der Werkstatt des Campus Johannstadt.
Wenn wir dein Interesse wecken konnten und du Lust hast, Rover oder andere Experimente zu bauen, melde dich bei uns unter info@star-dresden.de!
Bild 1: Ein Teil des S Cephei Teams mit einer Fallturm-Kapsel
Auch an Team S Cephei ging Corona nicht spurlos vorbei. So wurde uns im Frühjahr 2020 mitgeteilt, dass die REXUS Kampagne leider um ein Jahr verschoben werden muss. Eine ernüchternde Nachricht, da das Experiment bereits auf einem guten Weg war, einsatzbereit zu sein. Doch aufgrund des fortgeschrittenen Entwicklungsstandes des Experiments bot uns das ZARM aus Bremen die Möglichkeit an, das Experiment vor dem eigentlichen Raketenflug in ihrem Fallturm zu testen und so bereits erste wissenschaftliche Daten zu sammeln.
Das Zentrum für angewandte Raumfahrttechnologie und Mikrogravitation (ZARM) ist einer der Organisatoren des REXUS/BEXUS Programms. Das Institut verfügt über einen 146 m hohen Fallturm, in dem Experiment bis zu 9,8 s Mikrogravitation ausgesetzt werden können. Diese kurze Zeit eignet sich auch für unser Experiment, da der Ausrichtvorgang von CNTs (Carbon Nanotubes) bei bestimmten Leistungsparametern nicht viel länger als ein paar Sekunden dauert. Zwar müssen wir uns aufgrund der kurzen Mikrogravitation und begrenzter elektrischer Leistung auf die Hälfte der Kammern begrenzen, doch durch die hohe Wiederholbarkeit von bis zu zwei Flügen pro Tag war die Fallturmkampagne eine willkommene Möglichkeit, das Experiment perfekt auf den Flug in der Höhenforschungsrakete in Kiruna vorzubereiten.
Die Kampagne lief vom 10. bis 22. Mai 2021. Das Experiment wurde bereits in der Woche vor der Kampagne nach Bremen geschickt. Die Teammitglieder Robin, David, Jonathan und Joshua folgten dem Experiment dann am 9. Mai nach Bremen. Untergebracht waren wir in Apartments des 7THINGS-Hotels, welches sich zentral auf dem Uni Campus befindet und nur 5 Minuten vom ZARM entfernt ist.
Bild 2: Der 146 m hohe Fallturm des ZARM
Die erste Woche war für das Testen und die Integration des Experiments eingeplant. Das PoC (Pillars of Creation) System, der von STAR entwickelte Elektronik-Standard, wurde bereits vor der Kampagne auf Funktionalität getestet, aber noch nie tatsächlich verwendet. Hierbei galt es die Geduld zu bewahren, da sich die Inbetriebnahme aufgrund bisweilen unbekannter Probleme verzögerte. Durch das modulare Prinzip von PoC erforderte die Fehlersuche ein gewisses Maß an Präzision, zugleich konnten gefundene Fehler aber in kürzester Zeit durch Ersetzen des beschädigten Moduls behoben werden. Als die Hard- und Software schließlich einsatzbereit waren, stand dem Einbau des PoC Stapels nichts mehr im Weg. Gesteuert wurde das Experiment über die Bodenstation des ZARM, welche direkt mit der Kapsel im Fallturminneren in Kontakt stand.
Neben der Arbeit am Projekt blieb natürlich auch Zeit, die Stadt Bremen zu besichtigen. Die Bremer Altstadt hat neben imposanter Architektur auch einige naturbelassene Rückzugsorte zu bieten, wie zum Beispiel die Wiesen und Grünanlagen entlang der Weser. Auch der Campus der Universität Bremen bot, durch die Möglichkeit eines Besuchs am nahegelegen Campussee, die Möglichkeit zur Entspannung.
Die zweite Woche in Bremen war die Flugwoche. Los ging es am Montag mit der Kalibrierung unserer Fallturm-Kapsel, in der das S Cephei Experiment eingebaut war. Dabei wurde mit einer speziellen Messeinrichtung der Schwerpunkt der Kapsel festgestellt und durch durch das Anbringen von Massestücken an die gewünschte Position gebracht. Wenn der Schwerpunkt der Kapsel nicht exakt in der Mitte der Kapsel liegt, würde es während des Fallens zu Rotation kommen, was fatale Folgen haben könnte. Für ein Fallturm-Flug wurde unser Experiment zuerst in die Fallturm-Kapsel, in der auch ein zusätzlicher Bordcomputer für Strom und Kommunikation vorhanden war, eingebaut. Diese Kapsel wurde durch eine Außenhülle luftdicht verschlossen und danach in das Innere des Fallturms gebracht. Im Inneren des Turm ist eine sehr große Vakuumkammer, welche aus einem Raum im Erdgeschoss und der eigentlichen Fallröhre besteht. Der untere Raum beinhaltet die Abschuss- und die Auffangeinrichtung. Unsere Kapsel wurde unten im Fallturm auf das Katapult gehoben und anschließend die Vakuumkammer evakuiert. Da dieser Vorgang ca. 90 Minuten dauert, blieb genug Zeit, um vom Kontrollzentrum aus die Kommunikation zu unserem Experiment herzustellen. Sobald die Kammer luftleer gepumpt war, konnte das hydraulisch betriebene Katapult vorgespannt werden. Danach lag es an uns, den Abschuss über die Bodenstation zu starten. Das Katapult beschleunigt die Kapsel dabei mit bis zu 35g, während der Bordcomputer der Kapsel die Signale der REXUS-Rakete simuliert und unser Experiment somit gesteuert werden kann. Nach ca. 9 bis 10 Sekunden ist die Kapsel wieder sanft im Auffangbehälter gelandet. Dieser mit dämpfenden Styroporkügelchen gefüllte Behälter kann nach dem Katapultschuss über die Abschussvorrichtung schwenken und die Kapsel so wieder auffangen. Sobald der Kammerdruck wieder ausgeglichen war, wurde die Kapsel mit einem Kran aus dem Auffangbehälter gehoben und wir konnten sofort alle Daten auswerten. Jedoch war es aufgrund einer Live Videoübertragung von einer Kamera schon möglich, während des Fluges den Ausrichtvorgang der CNTs zu beobachten.
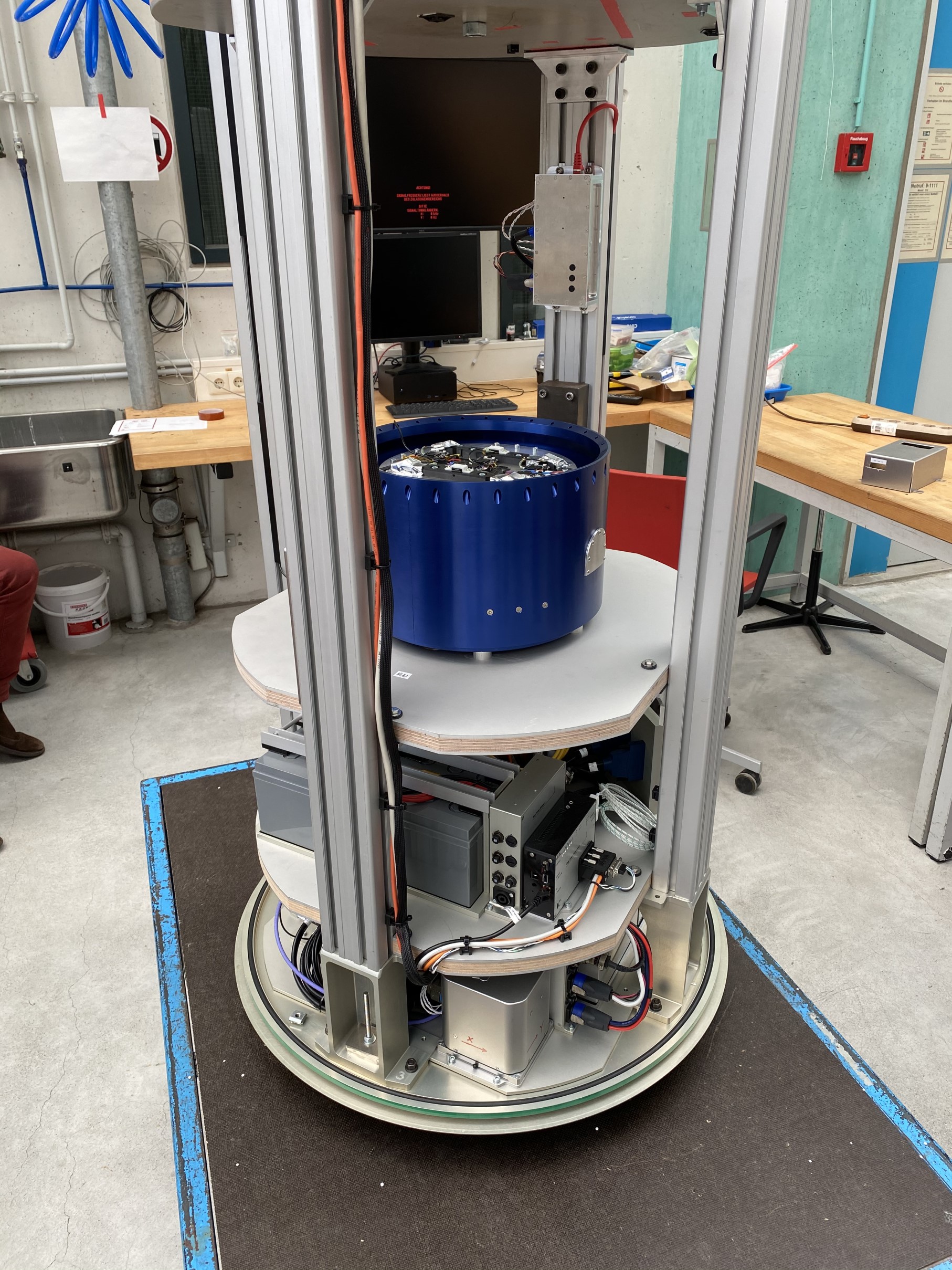
Bild 3: Unser Experiment im blauen REXUS-Modul integriert in der Fallturm-Kapsel (ohne Außenhülle)
Bereits in Dresden haben wir ausgiebig verschiedene Parameterkombinationen in unserem Experimentaufbau als Referenz getestet und konnten so einen genauen Plan mit den durchzuführenden Experimenten im ZARM aufstellen. Der erste Start sollte eigentlich am Montag Nachmittag stattfinden. Aufgrund von Schwierigkeiten mit dem Bordcomputer der Kapsel mussten wir den ersten Flug schließlich auf Dienstag verschieben. Bei diesem besonders spannenden ersten Flug hat unser Experiment reibungslos funktioniert. Beim zweiten Flug des Tages kam es jedoch zu unerwarteten Komplikationen. Bereits während des Evakuierungs-Vorgangs stellte sich heraus, dass die Kommunikation via WLAN stark verlustbehaftet war. Auch ein Neustart der Kommunikationsanlagen konnte dieses Problem nicht beheben. Es kam aber sogar noch schlimmer, als bei unserem routinemäßigen Testdurchlauf ein fehlerbehafteter Befehl das Programm beschädigte. Das Programm neu zu kompilieren und auf den Bordcomputer zu kopieren, schlug aufgrund der schwachen Verbindung zur Kapsel fehl. Dies lag unter anderem daran, dass das Katapult bereits im Spannvorgang war und die Kapsel somit in der Röhre des Katapults verschwunden war, was die Qualität der Verbindung nicht verbesserte. Das Katapult darf maximal zwei Minuten gespannt bleiben, weil ansonsten das Hydrauliköl zu warm werden würde. Alle Versuche das Experiment flugfähig zu bekommen schlugen in dieser Zeit fehl, weshalb wir den Flug ohne ein laufendes Experiment starten mussten.
Dieser Fehlschuss machte uns klar, dass wir auch die Zeit vor dem Abschuss nicht auf die leichte Schulter nehmen sollten. Von da an wurde vor den kommenden Flügen die Software mit Ethernet-Kabel auf den Bordcomputer kopiert und der Testdurchlauf mit ungespannten Katapult und nur bei guter Verbindung durchgeführt. Mit dieser gelernten Lektion konnten wir dann am Mittwoch, Donnerstag und Freitag jeweils zwei weitere Flüge durchführen. Besonders spannend und eindrucksvoll waren für uns auch die erlangten Einblicke in die Technik, welche den Fallturmbetrieb ermöglichen. So wurde uns unter anderem die einige Meter unter der Erde liegende Katapulteinrichtung gezeigt und erklärt. Außerdem konnten wir mit dem Aufzug hoch in die Spitze des Fallturms fahren, von der man eine sehr tolle Aussicht über das flache Bremer Land hat.
Bild 4: Die Aussicht von der Spitze des Fallturms
Insgesamt konnten wir sieben erfolgreiche Flüge mit jeweils zwei unterschiedlichen Experimentkonfigurationen durchführen. Dieses Ergebnis hat unsere Erwartungen definitiv übertroffen und ist damit ein voller Erfolg! Alle aufgenommenen Videos der Experimente gilt es jetzt auszuwerten, wobei wir für das Tracking der einzelnen CNT Partikel während des Ausrichtvorgangs gerade verschiedene Software-Lösungen testen. Der Bordcomputer der Kapsel hat während der Flüge außerdem einige Flug- und Leistungsparameter aufgezeichnet, wodurch wir nun noch mehr Daten haben, um unsere Systeme für den Flug in Kiruna zu optimieren. Während der Kampagne haben wir aber nicht nur wissenschaftliche Erkenntnis erlangt, sondern auch viele Kompetenzen im Sinne der Durchführung einer solchen Kampagne gewonnen. Dabei ist für uns die größte Erkenntnis, dass man nie zu viel Tests im Vorraus durchführen kann.
Die Abreise verlief wie geplant und am Freitag Abend fuhr der IC in Richtung Leipzig pünktlich am Hauptbahnhof Bremen ab. Im Zug konnten wir die mehrstündige Reisezeit nutzen, um den erlebnisreichen Aufenthalt in Bremen révue passieren zu lassen. Bis zur Kampagne in Kiruna ist aber noch einiges zu tun. So muss die Elektronik noch auf ihr thermales Verhalten im Vakuum getestet werden, die Bodenstation muss fehlerfrei laufen und die Beleuchtung der Kammern muss noch einmal überarbeitet werden. Dazu kommen noch kleine Quality-of-Life Improvements auf der Seite der Mechanik und dann steht einem erfolgreichen Start in Kiruna nichts mehr im Weg.
Zum Schluss möchten wir uns nochmal beim ZARM für die Unterstützung sowohl bei REXUS als auch bei dieser Kampagne bedanken. Ohne euch wäre all das nicht möglich gewesen! Die Fallturmkampagne war sehr wertvoll für uns und unser Experiment. Außerdem bedanken wir uns bei allen Mitarbeitern für die Unterstützung bei jeglichen Komplikationen. Wir freuen uns sehr, in der anstehenden Benchtest-Woche wieder am ZARM zu sein und alle Leute wiederzusehen.