Am Donnerstag dem 4.11. von 17:00 bis 19:30 gibt es ein Meet-Up! mit uns im Makerspace (DrePunct).
Zunächst werden wir etwas über unsere aktuellen Projekte erzählen und im Anschluss können wir in lockerer Runde über Fragen und Ideen sprechen. Wenn ihr also Interesse an unserer Arbeit habt und uns kennenlernen wollt, freuen wir uns über euren Besuch! Vielleicht habt ihr sogar selber Lust an unseren Projekten teilzunehmen.
Am Donnerstag, dem 09. September 2021 war es endlich so weit – unsere Reise zur European Rover Challenge 2021 in Kielce, Polen, sollte beginnen. Damit wir pünktlich um 13 Uhr in Polen unseren Zeitslot für Testfahrten auf dem Mars-Yard wahrnehmen konnten, begann unsere Reise schon 4 Uhr morgens.
Insgesamt 9 STARler waren mit von der Partie und verteilt auf zwei Transporter ging die Reise mit unserem Rover ELECTRA los. Gute acht Stunden und einige Zwischenstopps später hatten wir unser Ziel – die Kielce University of Technology – erreicht. Dort angekommen, machten wir uns zuerst einmal auf den Weg zum Marsyard, um unser zukünftiges Missionsgelände etwas näher unter die Lupe zu nehmen.
Image made by ERC2021
Nach einer kurzen Besichtigung und ersten Kontakten zu anderen Teams machten wir uns auf den Weg in die Teamzone. Dort bekommt jedes Team einen abgesteckten Bereich zugesprochen, in dem es an seinem Rover arbeiten kann. Für uns galt nun, alles Werkzeug auspacken und den Rover fahrtüchtig machen!
Kurze Zeit später stellte sich leider heraus, dass der Marsyard nicht zugänglich sein wird, weswegen wir die Zeit genutzt haben, um Fehler zu beheben und uns auf unsere erste Aufgabe am Freitag vorzubereiten. Gegen 20 Uhr machten wir uns dann auf den Weg zu unserer Unterkunft – ein Airbnb Haus etwa 20 Minuten außerhalb von Kielce.
Tag zwei begann wieder viel zu früh, da um kurz nach 7 Uhr direkt eine Morgenbesprechung mit allen Teamleitern angesetzt war.
Unser weiterer Tagesplan sah um 16 Uhr den sogenannten Mega Task vor. Hierbei werden drei der vier technischen Aufgaben in einem Task gebündelt und das Team hat eine Stunde Zeit, um diese zu absolvieren. Im Detail muss der Rover dabei (nach Möglichkeit autonom) bestimmte Wegpunkte anfahren, Bilder für die wissenschaftliche Mission und von unerwarteten Gegenständen machen und Mess-Sonden verteilen und wieder einsammeln.
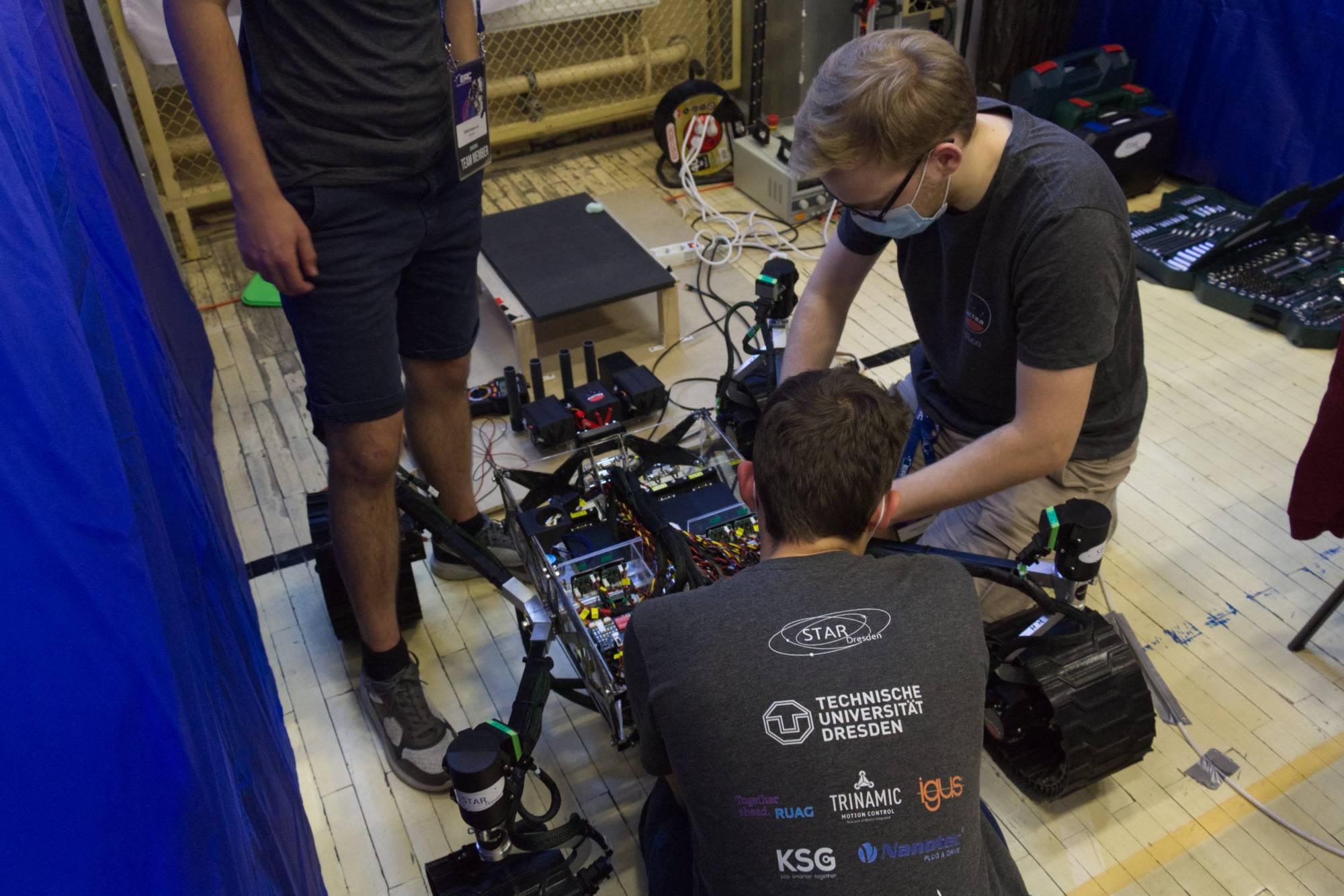
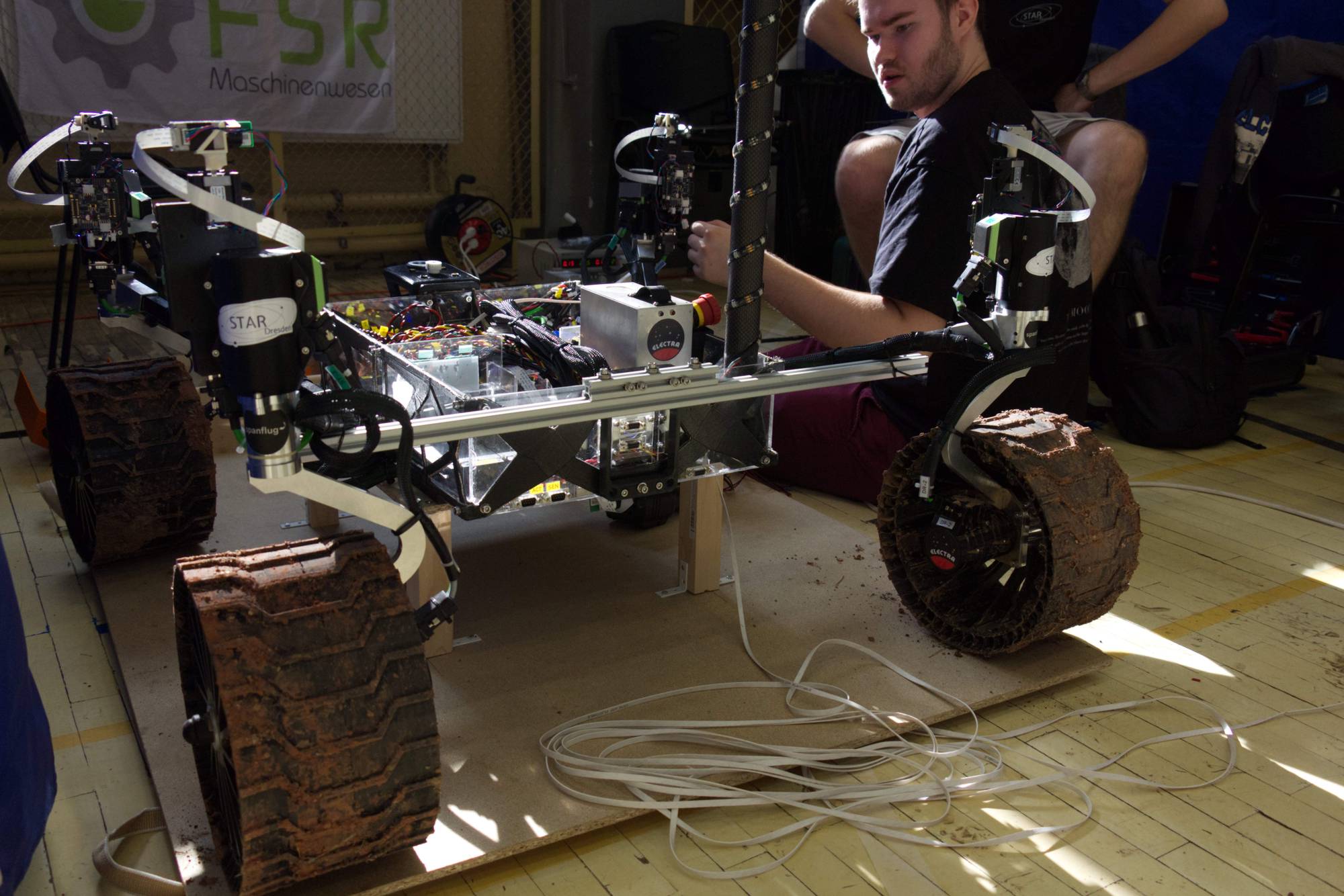
Aufgrund technischer Schwierigkeiten – das Differentialgetriebe konnte nicht das Gewicht von Arm und Bohrer tragen – mussten wir allerdings auf unseren robotischen Arm und den Bohrturm am Rover verzichten. Deshalb blieb nichts anderes übrig, als uns bei dieser Aufgabe auf die Navigation und das Aufnehmen von Bildern zu beschränken. An der Startlinie angekommen, haben wir unsere Bodenstation im Zelt eingerichtet und uns mental auf die kommende Aufgabe vorbereitet.
Unser Rover Operator (Arno, 3. v.l., Bild oben) wurde dabei unterstützt von Jonas an der Telemetrie Station (ganz links), Alex G. an der Bodenstation (2. v.l.), Lucas als Navigator (2. v.r.) und Benjamin als Videooperator (rechts).
Der Rover selbst wurde von Alex K. (1. v.l., Bild unten) und Rico (2. v.l.) begleitet, um im Notfall schlimmeres zu verhindern, da die Teams an der Bodenstation keinen direkten Sichtkontakt zum Rover haben.
Bei dieser Aufgabe konnten wir die hervorragende Mobilität und Geländegängigkeit von ELECTRA unter Beweis stellen. Kein Hindernis war zu groß und mit durchgehend perfektem Bodenkontakt, dank Differential-Aufhängung, konnten wir selbst auf unebenem Untergrund mühelos fahren. Was uns während der Mission allerdings einen Strich durch die Rechnung machte, war die etwas lockere Halterung der Batterien. So bestand bei jedem Hindernis die Gefahr, dass eine Batterie rausspringt und die Verbindung zur Bodenstation abreißt. Einige Minuten nach Start geschah leider auch genau das und während für die Bodenstation nur die Verbindung kurz weg war, fuhr unser Rover in diesem Moment einen kleinen Kreis. Da der Kontakt mit den Kameras wieder hergestellt war, nachdem ELECTRA genau eine volle Runde gefahren war, war dem Team an der Bodenstation nicht bewusst, was gerade passiert war. Dazu muss erwähnt werden, dass zu diesem Zeitpunkt niemand im Team ahnte, dass ELECTRA einfach weiter fährt, wenn keine Verbindung mit der Bodenstation besteht. Das Außenteam hatte deswegen ernsthafte Zweifel an unserem kleinen (unfreiwilligen) Manöver mit der Annahme, dass alle Bewegungen des Rovers bewusst gesteuert werden. Nichts-desto trotz hatten wir den ersten Wegpunkt perfekt erreicht und steuerten nun den zweiten von insgesamt vier an! Und wie es so schön heißt, “Erst hatten wir kein Glück und dann kam auch noch Pech hinzu.”, passierte das gleiche Malheur kurz darauf noch einmal. Allerdings fuhr der Rover diesmal geradeaus weiter und die Verbindung baute sich nicht wieder von alleine auf. Unser Elektrotechniker ahnte inzwischen, dass die Batterien vermutlich etwas locker saßen und so wurde er – bewaffnet mit einer Rolle Panzertape – zum Rover geschickt, um das Problem zu beheben. Diese Aktion hat uns zwar wertvolle Punkte gekostet, allerdings war der Rover anschließend wieder funktionsfähig. Zur allgemeinen Verwunderung der Bodenstations-Crew war unser Rover allerdings an einem völlig anderen Ort, als sich die Verbindung zu den Kameras wieder herstellte. Etwa 15 m weiter, waren wir in den südlichen Krater gefahren und hatten somit unfreiwillig unseren 3. Wegpunkt erreicht. Gleichzeitig hatten wir etwas Wasser am Boden des größten Kraters gefunden, in den ELECTRA ohne Verbindung zur Bodenstation einfach hinein gerutscht war! Glück im Unglück – später haben wir erfahren, dass ein anderes Team sich auf der gleichen Route beim Hineinfahren überschlagen hat.
Im weiteren Verlauf haben wir aufgrund der bereits sehr fortgeschrittenen Zeit entschieden, die Navigationsaufgabe vorzeitig zu beenden und mit dem wissenschaftlichen Teil weiterzumachen. Im Folgenden konnten wir – neben dem Wasser – auch eine extra-terrestrische Lebensform, einen Lavatunnel und interessante Steine dokumentieren.
Damit wurde der erste Aufenthalt unseres Rovers auf dem Marsyard erfolgreich beendet. Auch wenn nicht alles geklappt, konnten wir dennoch eine Menge lernen, die Fähigkeiten unseres Rovers austesten und hatten viel Spaß, diese Mission zu planen und umzusetzen.
Um das Problem zu lösen, wurde entschieden, den Bohrer zu zerlegen und mithilfe einer der drei Alu-Profilstangen eine “Not-So-Differential-Bar” zu bauen und den Rover damit zu stabilisieren. Dadurch wurde das Differentialgetriebe blockiert und der Körper lief keine Gefahr mehr umzukippen und auf dem Boden zu schleifen. Auf diese Weise wurde zwar die Geländegängigkeit von ELECTRA “abgestellt”, welche für diese Aufgabe aber von keiner Bedeutung ist.
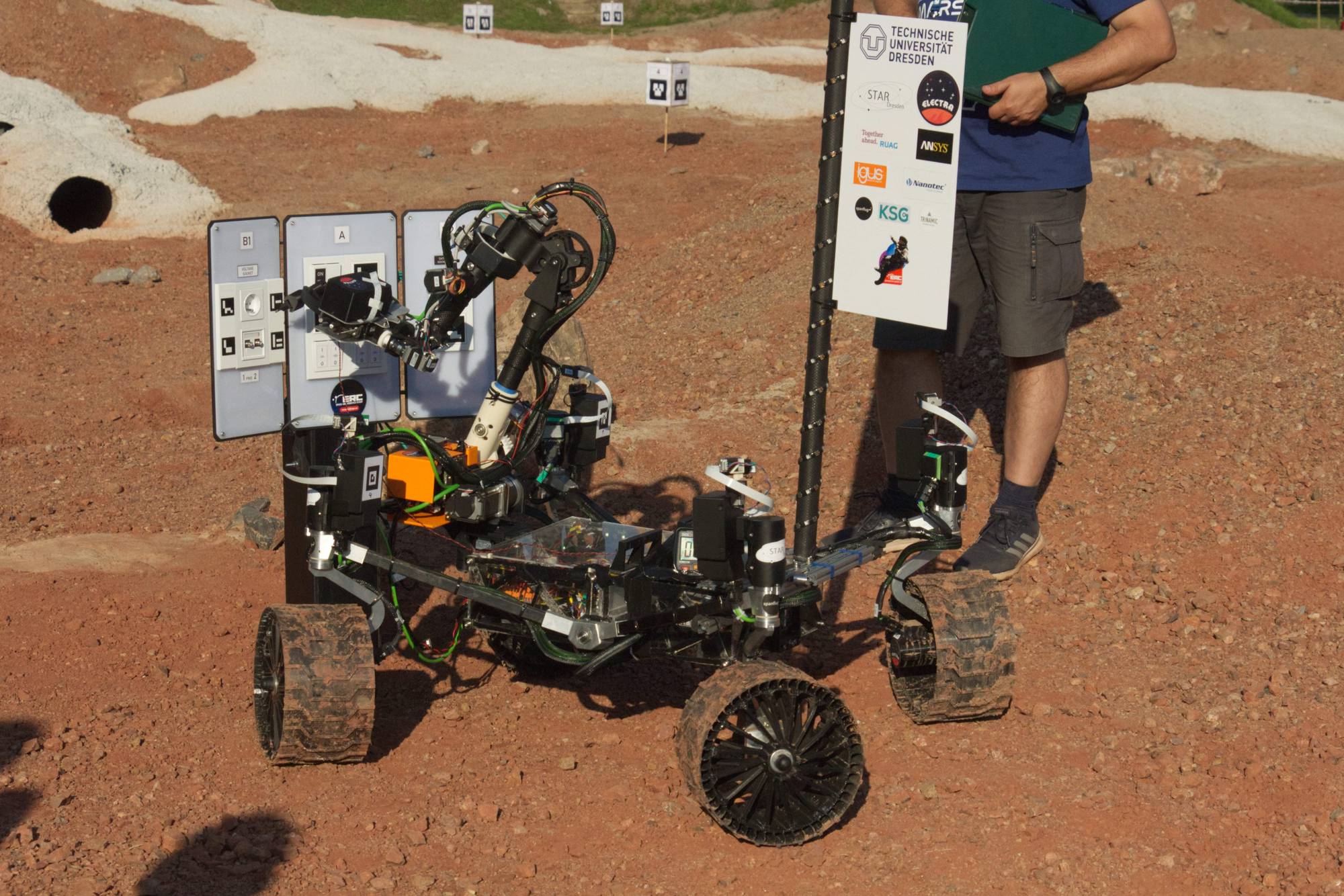
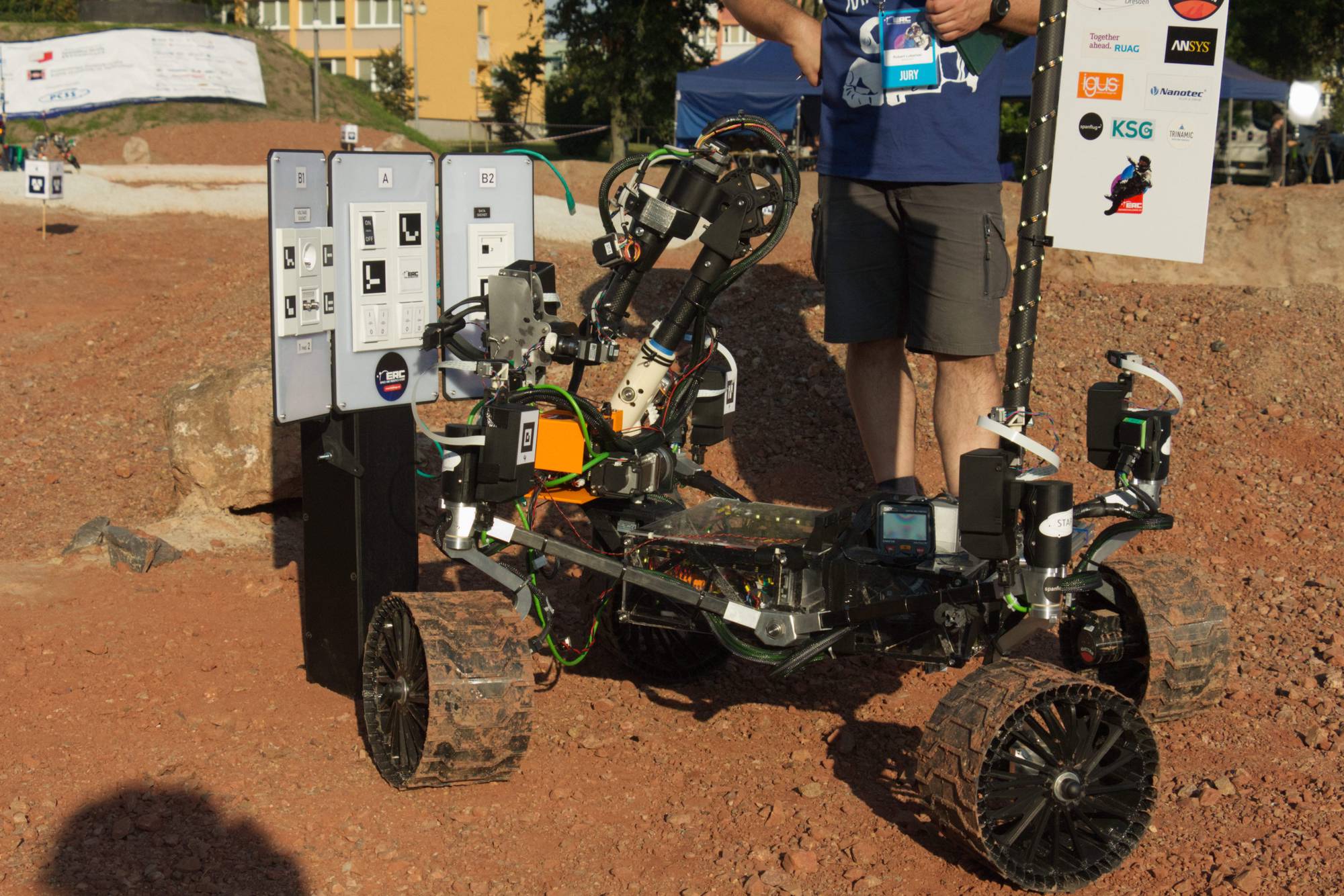
Nach den Vorbereitungen machten wir uns auf den Weg zum Marsyard, um die letzte Aufgabe zu bewältigen. Dort angekommen, bereiteten wir wieder unsere Bodenstation vor und wurden vom Kampfrichter kurz eingewiesen. Anschließend hatten wir 30 Minuten Zeit, diverse Schalter zu drücken, die Spannung in einer Steckdose zu messen und einen LAN-Stecker einzustecken.
Aufgrund mangelnder Erfahrung im Umgang mit ELECTRA’s Arm hatten wir allerdings mit diversen Problemen zu kämpfen, da die optische Tiefenwahrnehmung durch eine Kamera sehr schwierig ist und wir somit ziemlich nah vor dem Panel standen. Dadurch waren wir nicht in der Lage, den Stecker zur Messung der Spannung vernünftig einzustecken und mussten diese Teilaufgabe kurz darauf aufgeben. Im nächsten Schritt wollten wir dann die Messsonde fallen lassen, um so die Schalter besser betätigen zu können, allerdings hatten sich die Finger verkantet und die Motoren waren somit nicht in der Lage, den Greifer zu öffnen. Mit erhöhtem Schwierigkeitsgrad machten wir uns also daran, die Schalter zu drücken und konnten kurz vor Schluss tatsächlich den letzten der fünf zu drückenden Schalter umlegen!
Nach getaner Arbeit fiel eine riesige Last von uns ab, da die European Rover Challenge 2021 aus unserer Sicht abgeschlossen war. Alle Aufgaben konnten mehr oder weniger erfolgreich bewältigt werden und wir hatten ab sofort Zeit, uns mit den anderen Teams kurzzuschließen.
Am Sonntag konnten wir zum ersten Mal länger schlafen und ein gemütliches Frühstück mit frischem Obst aus dem Garten unserer Unterkunft genießen. Kurz nach dem Mittagessen war dann der Marsyard für alle Teams geöffnet, um mit ihren Rovern das Gelände zu erkunden und den Zuschauern die Möglichkeit zu geben, hautnah dabei zu sein.
Als in der darauf folgenden Siegerehrung die Preise bekannt gegeben wurden, konnten wir uns über einen starken 5. Platz in der Gesamtwertung freuen. Wir sind unheimlich stolz auf dieses Ergebnis, da ELECTRA unser erster Rover ist und wir uns in einem Bewerberfeld aus 57 Teams aus der ganzen Welt definitiv behaupten konnten. Natürlich sind wir bereits dabei, die European Rover Challenge 2022 vorzubereiten!
An dieser Stelle möchten wir uns für die Hilfe aller unserer Sponsoren und Unterstützer bedanken, ohne die dieser Erfolg und die Erfahrungen nicht möglich gewesen wären.
Vielen Dank an die TU Dresden, KSG GmbH, IGUS, NanoTec, RUAG Space Germany, Trinamics, Spanflug, dem FSR Maschinenwesen, RapidHarness und der Werkstatt des Campus Johannstadt.
Wenn wir dein Interesse wecken konnten und du Lust hast, Rover oder andere Experimente zu bauen, melde dich bei uns unter info@star-dresden.de!
Picture 1: Part of the S Cephei team with a drop tower capsule
Corona also left its mark on the S Cephei team. In spring 2020, we were informed that the REXUS campaign would unfortunately have to be postponed by one year. This was sobering news, as the experiment was already well on its way to being operational. But due to the advanced state of development of the experiment, ZARM from Bremen offered us the opportunity to test the experiment in their drop tower before the actual rocket flight and thus already collect first scientific data.
The Center of Applied Space Technology and Microgravity (ZARM) is one of the organizers of the REXUS/BEXUS program. The institute has a 146 m high drop tower in which experiments can be exposed to microgravity for up to 9.8 s. This short time is suitable for our experiment, since the alignment process of CNTs (carbon nanotubes) does not take much longer than a few seconds at certain power parameters. Although we have to limit ourselves to half of the chambers due to the short microgravity and limited electrical power, the high repeatability of up to two flights per day made the drop tower campaign a welcome opportunity to perfectly prepare the experiment for flight in the sounding rocket in Kiruna.
The campaign ran from May 10 to 22, 2021. The experiment was already sent to Bremen the week before the campaign. The team members Robin, David, Jonathan and Joshua then followed the experiment to Bremen on May 9. We were accommodated in apartments of the 7THINGS-Hotel, which is centrally located on the university campus and only 5 minutes away from ZARM.
Picture 2: The 146 m high drop tower of ZARM
The first week was scheduled for testing and integration of the experiment. The PoC (Pillars of Creation) system, the electronics standard developed by STAR, had already been tested for functionality prior to the campaign, but had never actually been used. Patience had to be maintained here, as commissioning was delayed due to sometimes unknown problems. Due to PoC's modular principle, troubleshooting required a certain degree of precision, but at the same time, any errors found could be fixed in a very short time by replacing the damaged module. When the hardware and software were finally ready for use, nothing stood in the way of installing the PoC stack.
The experiment was controlled via the ZARM ground station, which is in direct contact with the capsule inside the drop tower.
In addition to working on the project, there was of course time to visit the city of Bremen. In addition to impressive architecture, Bremen's old town also has some natural retreats to offer, such as the meadows and green spaces along the Weser River.
The campus of the University of Bremen also offered the opportunity to relax with a visit to the nearby campus lake.
The second week in Bremen was the flight week. We started on Monday with the calibration of our drop tower capsule, in which the S Cephei experiment was installed. The center of gravity of the capsule was determined with a special measuring device and brought to the desired position by attaching mass pieces. If the center of gravity of the capsule was not exactly in the middle of the capsule, rotation would occur during the fall, which could have fatal consequences. For a drop tower flight, our experiment was first installed in the drop tower capsule, which also contained an additional on-board computer for power and communications. This capsule was sealed airtight by an outer shell and then moved to the inside of the drop tower. Inside the tower is a very large vacuum chamber, which consists of a room on the first floor and the actual drop tube. The lower room contains the launch and recovery equipment. Our capsule was lifted onto the catapult at the bottom of the drop tower and then the vacuum chamber was evacuated. Since this process takes about 90 minutes, there was enough time to establish communications with our experiment from the control center. Once the chamber was pumped empty of air, the hydraulically operated catapult could be preloaded. After that, it was up to us to launch via the ground station. The catapult accelerates the capsule with up to 35g, while the on-board computer of the capsule simulates the signals of the REXUS rocket and can thus control our experiment. After about 9 to 10 seconds, the capsule gently lands again in the recovery container. This container, filled with damping Styrofoam beads, can swing over the launcher after the catapult shot and thus catch the capsule again. As soon as the chamber pressure was equalized again, the capsule was lifted out of the catching container by a crane and we could immediately evaluate all data. However, due to a live video transmission from a camera, it was already possible to observe the alignment process of the CNTs during the flight.
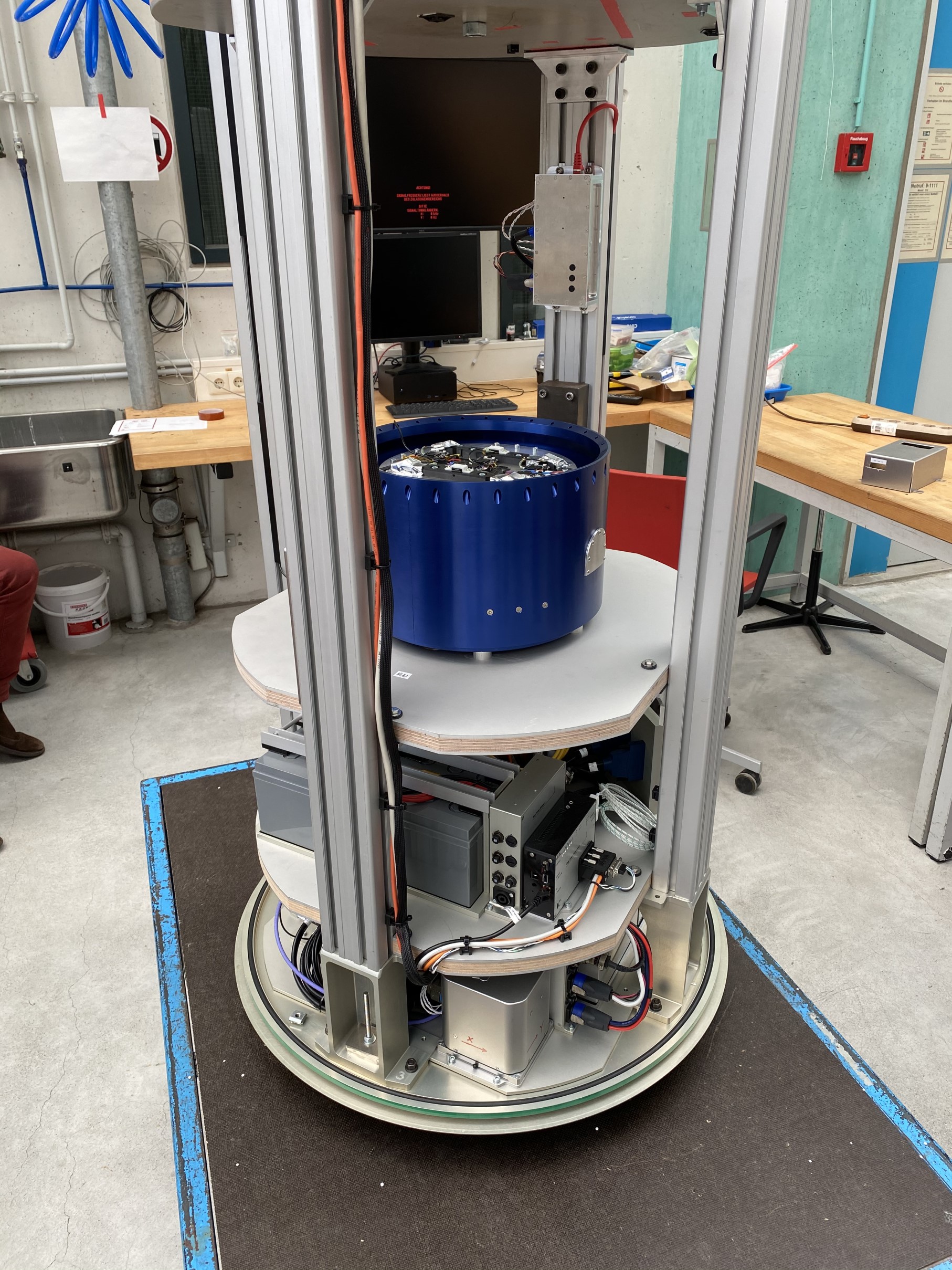
Picture 3: Our experiment in the blue REXUS module integrated in the drop tower capsule (without the outer shell)
We had already extensively tested various parameter combinations in our experiment setup in Dresden as a reference and were thus able to set up a precise plan with the experiments to be performed at ZARM. The first launch was actually scheduled for Monday afternoon. Due to difficulties with the capsule's on-board computer, we eventually had to postpone the first flight until Tuesday. During this particularly exciting first flight, our experiment worked smoothly. On the second flight of the day, however, unexpected complications arose. Already during the evacuation procedure, it turned out that the communication via WLAN was heavily lossy. Even a restart of the communication systems could not solve this problem. But it got even worse when, during our routine test run, an erroneous command corrupted the program. Recompiling the program and copying it to the on-board computer failed because of the weak connection to the capsule. This was due in part to the fact that the catapult was already in the cocking process and thus the capsule had disappeared into the tube of the catapult, which did not improve the quality of the connection. The catapult may remain tensioned for a maximum of two minutes, because otherwise the hydraulic oil would become too hot. All attempts to get the experiment ready to fly failed during this time, so we had to start the flight without a running experiment.
This failure made us realize that we should not take the time before the launch lightly either. From then on, before the upcoming flights, the software was copied to the on-board computer with Ethernet cables and the test run was done with the catapult untensioned and only with a good connection. With this lesson learned, we were then able to perform two more flights each on Wednesday, Thursday and Friday. Particularly exciting and impressive for us were also the acquired insights into the technology that makes the drop tower operation possible. Among other things, we were shown and explained the catapult equipment located several meters below ground. In addition, we were able to take the elevator up to the top of the drop tower, from where we had a great view over the flat Bremen countryside.
Picture 4: The view from the top of the drop tower
In total, we were able to perform seven successful flights, each with two different experiment configurations. This result has definitely exceeded our expectations and is thus a complete success! All recorded videos of the experiments have to be evaluated now, and we are currently testing different software solutions for tracking the individual CNT particles during the alignment process. The capsule's on-board computer also recorded some flight and performance parameters during the flights, which means we now have even more data to optimize our systems for the Kiruna flight. During the campaign, however, we not only gained scientific knowledge, but also gained many skills in terms of conducting such a campaign. The biggest insight for us is that you can never do too much testing in advance.
The departure went as planned and on Friday evening the IC in the direction of Leipzig departed punctually from the main station in Bremen. On the train we could use the several hours of travel time to reflect on the eventful stay in Bremen. However, there will still be some work to do before the campaign in Kiruna. For example, the electronics still have to be tested for their thermal behavior in a vacuum, the ground station has to run without errors, and the lighting of the chambers has to be reworked. In addition, there will be small quality-of-life improvements on the mechanics side and then nothing should stand in the way of a successful start in Kiruna.
Finally, we would like to thank ZARM again for their support both with REXUS and with this campaign. Without you all this would not have been possible! The drop tower campaign was very valuable for us and our experiment. We would also like to thank all of the staff for their support during any complications. We are very excited to be back at ZARM during the upcoming Benchtest week and to see all the people again.