STAR beim Rover Träff 2025
Zum dritten Mal fand vom 9. bis 11. Mai der Rover Träff an der FHNW Brugg-Windisch in der Schweiz statt und STAR Dresden war dieses Jahr zum zweiten Mal dabei.
Dabei waren natürlich das schweizer Heimteam der FHNW. Neben uns waren da noch deutsche Teams aus Frankfurt, Berlin und erstmals aus München, sowie ein italienisches und ein zweites schweizer Team dabei.
Vorbereitung
Unsere Planung der Anreise hing vor allem an der Förderung der Reisekosten durch das FOSTER Programm der TU Dresden, finanziert aus der Exzellenzstrategie von Bund und Ländern. Durch die Unterstützung konnten wir mit insgesamt 9 Teilnehmern und zwei Fahrzeugen zum Träff fahren.
Beim Lesen der Regeln wurde schnell klar, welche Aufgaben wir ohne großen Aufwand bewältigen können und welche noch etwas Vorbereitung verlangen würden.
Den Rover hatten wir einige Tage vorher ohnehin für die European Rover Challenge auf Fahrtüchtigkeit überprüft.
Leider wurde die neue und selbst entwickelte Drohne, die erstmals Teil vom Rover Träff war, nicht vor der Abfahrt fertig, weil beim ersten Test einige Tage vorher ein Problem festgestellt wurde.
Freitag
Die Strecke von Windisch nach Dresden ist ca. 700 km.
Deshalb haben wir uns schon um 06:30 an der Uni getroffen, um alles einzuladen.
Alle 9 STARler kamen pünktlich (oder zumindest innerhalb des akademischen Viertels) an.
Neben dem Rover haben wir wie immer noch einiges an Werkzeug und Zubehör einpacken müssen, das meiste Gepäck waren aber definitiv Schlafsäcke.
Absichtlich nicht mitgenommen haben wir den WIFI Access Point der Bodenstation, wo wir normalerweise unsere Laptops anschließen. Auf der ERC in Polen hatten wir ihn nie wirklich gebraucht.
Für die Reiseverpflegung sind wir zu REWE gegangen, wo sich jeder ein paar Snacks und Getränke besorgt hat. Außerdem haben wir noch einen Kasten Lohmanns eingeladen. Hintergrund war eine neue Regel vom Träff; jedes Team sollte einen Kasten lokales Bier mitbringen und diese Punkte durften auch wir uns nicht entgehen lassen.
Um kurz nach 8 war die Abfahrt. Wie schon letztes Jahr mussten wir einen kleinen Zwischenstop nahe Stuttgart in Backnang machen. Dort haben wir dann noch einen zehnten STARler, Jonas, eingesammelt.
Aus dem Fehler vom letzten Jahr haben wir gelernt und haben einen großen Bogen um das Stuttgarter Zentrum gemacht, weil sich “Stuttgart das Auto nicht verbieten lässt” und dementsprechend der Verkehr mehr als nur unangenehm ist.
Der Grenzübergang war wie gewohnt einfach (Schengen Raum sei Dank) und so kamen wir genau zur Begrüßung um 19:00 auf dem Campus der FHNW an.
Nach einigen organisatorischen Informationen der Veranstalter haben wir unseren Schlafraum bezogen.
Wie im Jahr davor war es wieder ein Seminarraum im Dachgeschoss der Hochschule, wo wir die Tische und Stühle so zurecht schoben, dass unsere Isomatten Platz fanden.
Einigen von uns war das aber nicht gemütlich genug und deshalb haben sie sich die Sitzcouches vom Flur zusammengeschoben und Betten gebaut – ganz die Ingenieure eben.
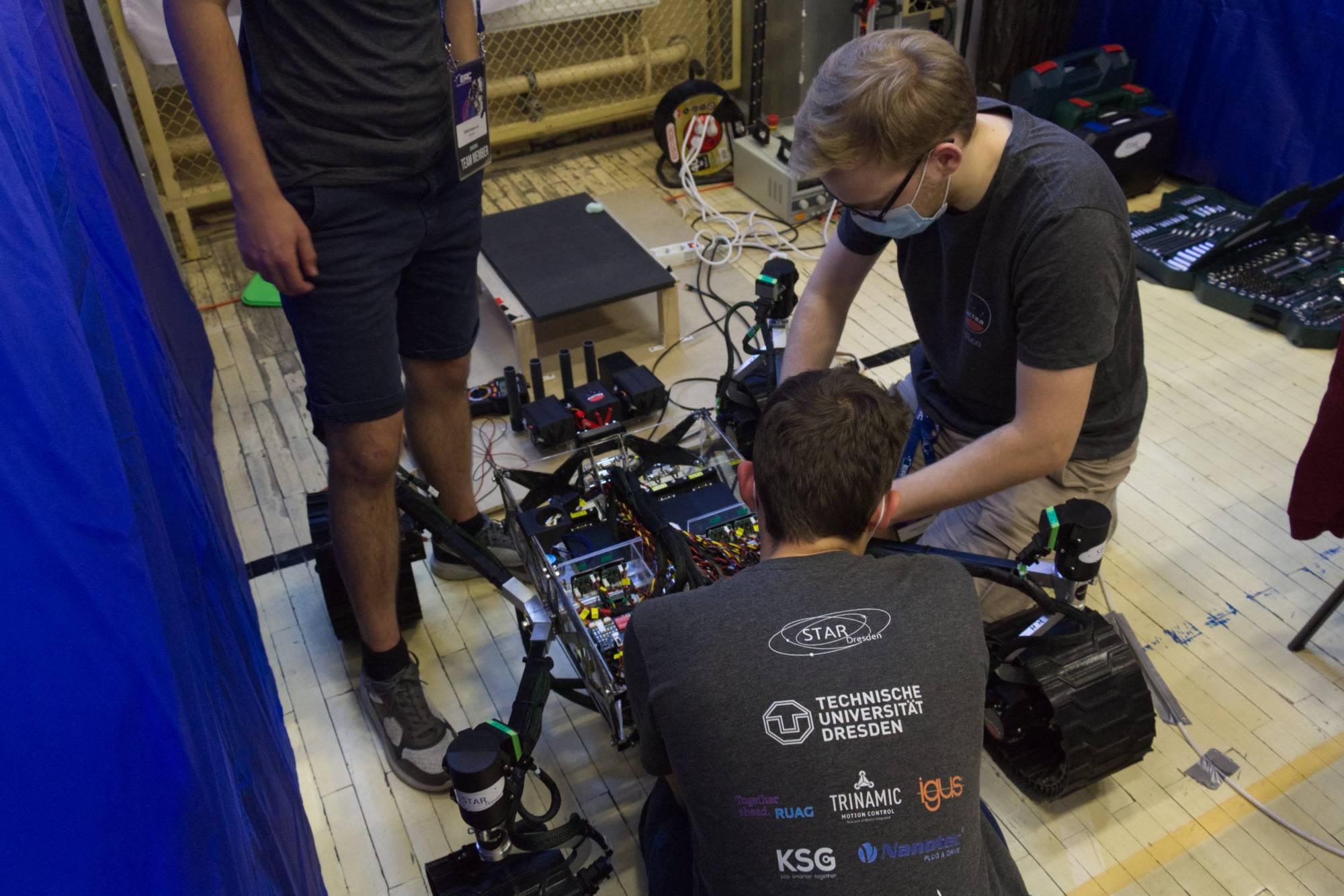
Mit dem Schlafplatz vorbereitet konnten wir guten Gewissens Abend essen. Wieder gestärkt packten wir den Rover und das Werkzeug aus dem Transporter in die Teamzone.
Auch das war wieder ein Seminarraum, wo wir zwei ganze Tischreihen für unsere Arbeiten am Rover hatten.
Mit uns im Raum war auch die WARR aus München. Unser erster Eindruck von den Konkurrenten war eine Beruhigung: Auf dem Beamer wurde noch ein Bauteil im CAD konstruiert und der 3D-Drucker lief auch noch. “Den gehts also auch manchmal so wie uns“, dachten wir. Diese Art des indirekten Austauschs ist eines unserer Highlights vom Rover Träff.
Beim Aufbau unseres Equipment haben wir bemerkt, dass wir nur einen einzigen Adapter von schweizer auf deutsche Steckdosen eingepackt hatten … wieso haben die auch andere Stecker …
Somit gingen alle Laptops, Bildschirme und die Rover Ladestation durch einen Adapter.
Nicht ideal, aber es hat funktioniert und wir haben nichts abgefackelt.
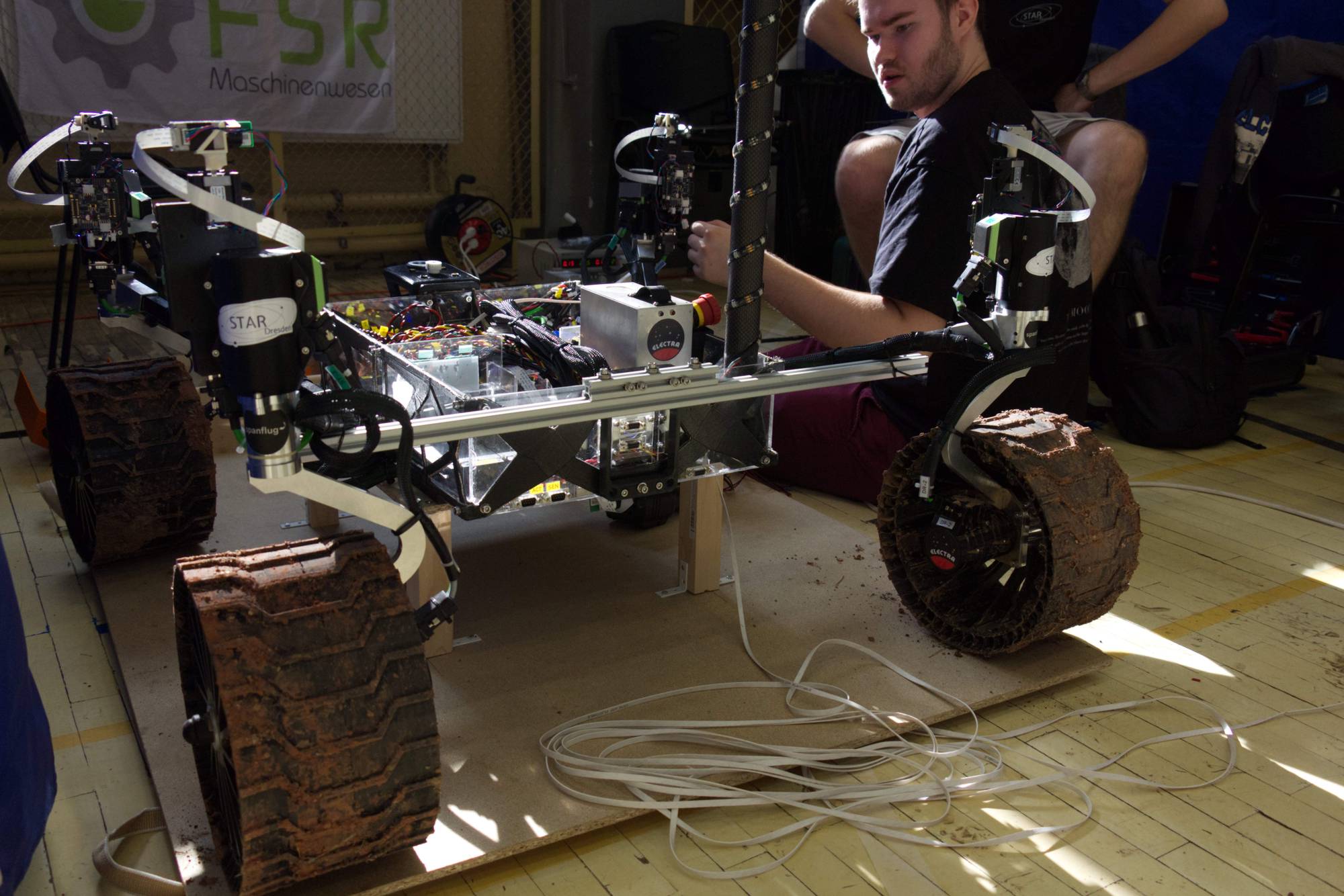
Um sicherzugehen, dass am Samstag alles funktionieren würde, sind wir mit dem Rover etwas rumgefahren und haben Dinge mit dem robotischen Arm angehoben.
Die beiden Arbeitsintensivsten Änderungen waren bei den Kameras, wo vorher nicht alle 4 funktioniert hatten, und die Lokalisierung, die aber noch den ganzen Abend Probleme gemacht hat.
Erschöpft, aber zuversichtlich sind wir gegen Mitternacht ins Bett gegangen.

Samstag
Aufbau und Training
Nach dem Frühstück um 7 Uhr hatten wir noch etwas Zeit, um den Rover nochmals zu testen.
Die haben wir vor allem genutzt, um das Zelt zu beziehen, von dem aus wir den Rover steuern würden.
Ähnlich wie bei der ERC darf man während der Challenge nicht den Rover direkt sehen, sondern sitzt einige Meter entfernt in einem Zelt und schaut durch einen Kamera-Feed, was der Rover gerade macht.
Anders als bei der ERC mussten wir unser Zelt nicht nach jeder Aufgabe wechseln, sondern konnten den ganzen Tag dort bleiben – sehr angenehm.
Unsere Bodenstation besteht aus mehreren Laptops, die jeweils eine eigene Aufgabe haben.
Die Veranstalter haben uns beim Aufbau auch gebeten, uns mit einem HDMI Kabel zu verbinden, was sie in unser Zelt verlegt haben. Die Idee war es, den Hauptbildschirm von jedem Team zu haben und für die Gäste auf einem großen Bildschirm anzuzeigen.
Nach einigem Hin und Her hat der Linux Laptop mit den wichtigsten Kameraeinstellungen funktioniert.
Theo wollte unbedingt noch mit dem Maintenance Panel trainieren, an dem später die Task durchgeführt werden würde. Als Armoperator muss er den Aufbau der Aufgabe verstehen, weil durch die 2D Kamerabilder einiges an Tiefeninformation verloren geht.
Als er dann zufrieden war, war es auch schon 10:30 Uhr und Zeit für die erste Aufgabe.
Über alle Tasks hinweg zeigte sich wieder die Nützlichkeit unserer Funkgeräte.
Das Team konnte total verteilt sein, aber dennoch gut miteinander kommunizieren.
Eigentlich seltsam, dass wir das einzige Team mit welchen waren – das wird nächstes Jahr bestimmt anders sein.
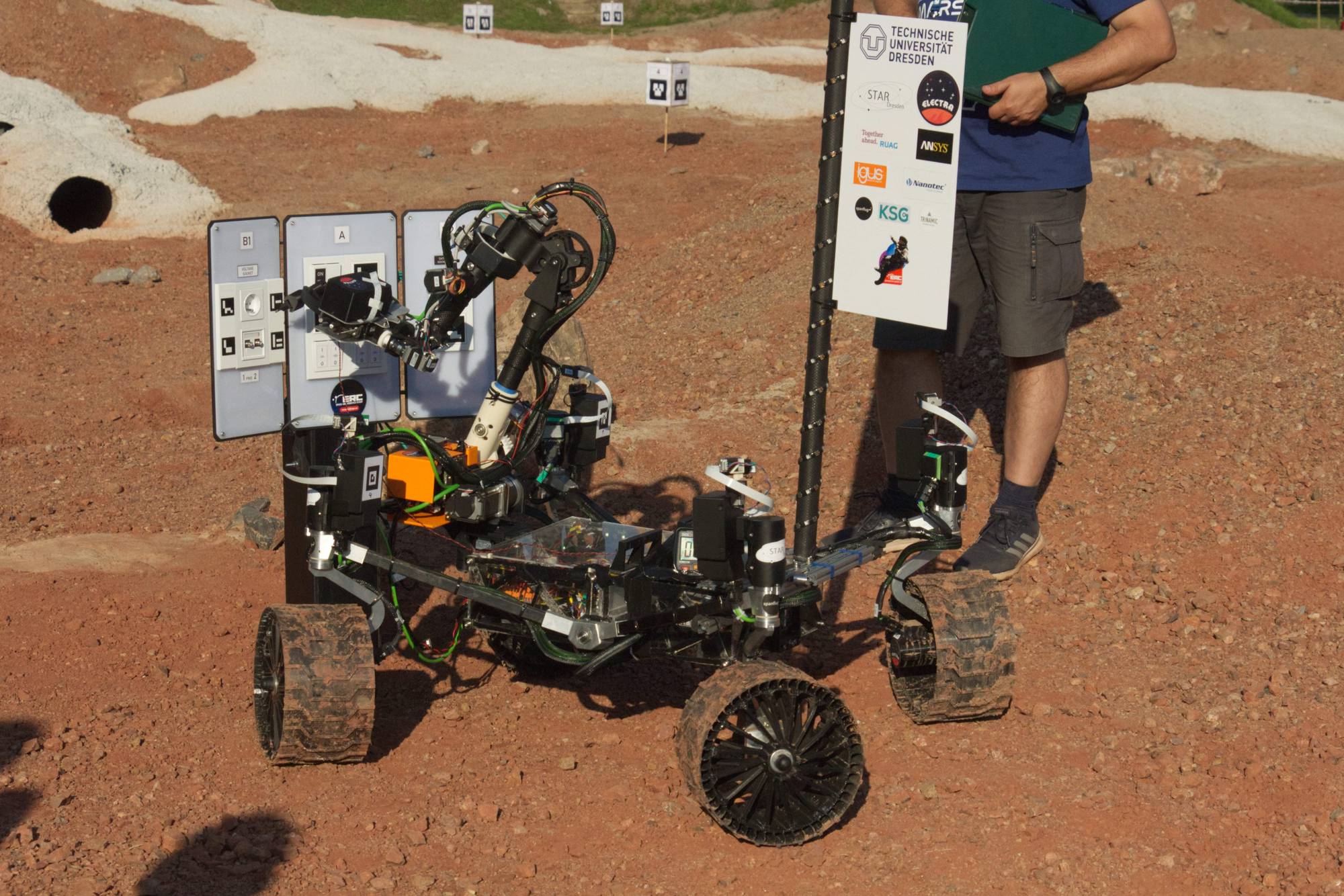
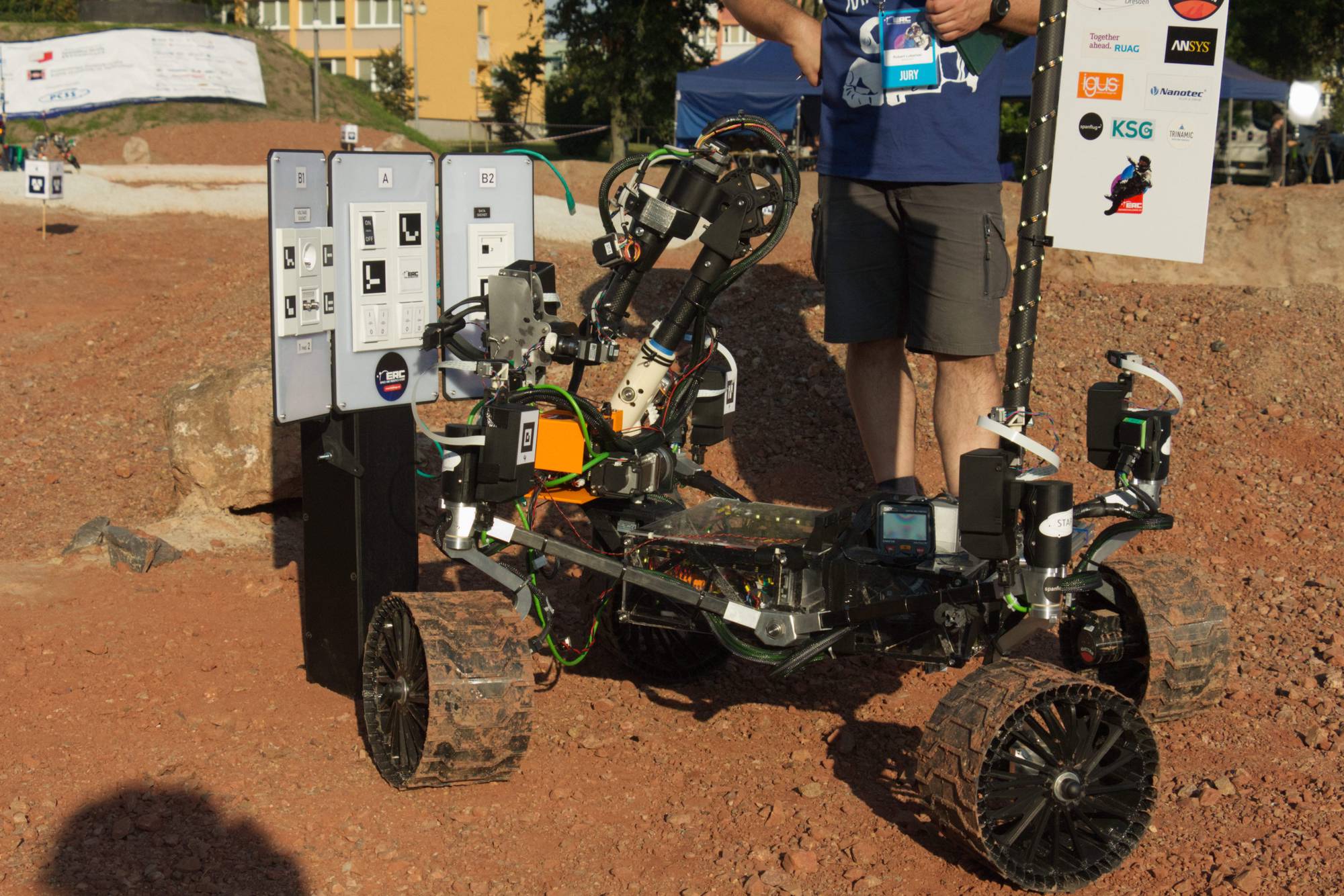
Maintenance Task
Nach dem Training am Maintenance Panel mussten wir den Rover kaum bewegen, um die erste Aufgabe zu beginnen. Wir hatten 30 Minuten Zeit um einen Hebel umzulegen, 4 Werte auf einem Bildschirm einzustellen und „Brennstäbe“ zu wechseln.
Das anspruchsvollste dabei war das Einstellen der Werte, weil die Helligkeit des Bildschirms einfach nicht gegen die knallende Sonne ankam.
Unsere Lösung war es jemanden daneben stehen zu haben, der mit einem Stück Pappe schatten auf den Bildschirm wirft.
Um einem besseren Griff zu haben mussten wir hin und wieder auch den Rover bewegen.
Darum war neben Theo auch Carl als Fahrer im Zelt.
Julius stand hinter den beiden um die Zeit im Blick zu halten und im Notfall die Groundstations neu zu starten.
Durch das Training direkt vor Beginn der Aufgabe konnte Theo alles innerhalb von 20 Minuten abschließen. Er wäre sicherlich noch schneller gewesen, wenn wir weniger Verbindungsprobleme gehabt hätten… ein Omen?
Als es spannend wurde, unserem Rover zuzuschauen, sammelte sich eine Menschenmenge von ca. 50 Personen zwischen dem Rover und dem Zelt.
Das hatte sehr negative Auswirkungen auf die Verbindungsqualität zum Rover – Menschen bestehen aus Wasser und das schluckt WLAN richtig gut.
Wenn wir den Access Point für die Bodenstation dabei gehabt hätten, welcher deutlich mehr Sendeleistung als die verwendeten Laptops hat, wäre das sicherlich kein Problem gewesen.
Ohne sinnvolles Bild konnte der Rover nicht bewegt werden, was wieder so uninteressant war, dass sich die Menschenansammlung verstreute und das Signal spürbar besser wurde – diese Erfahrung haben wir dann direkt für die nächsten Tasks genutzt.

Probing Task
Beim Probing mussten drei metallische Stäbe, sog. “Probes”, verteilt werden, ein Stein eingesammelt und gewogen sowie ein Loch gebohrt werden.
Da unser Bohrer noch nicht einsatzbereit war, haben wir uns auf das Ablegen und Einsammeln fokussiert – wiegen konnten wir leider auch nicht.
Weil der Bereich dieser Aufgabe noch weiter vom Zelt entfernt war, hatten wir schon vor der Aufgabe massive Verbindungsprobleme. Darum haben wir entschieden, die Antenne vom Rover abzubauen und an einem Stab nebenher zu tragen, damit er über die Zuschauer hinweg senden konnte. Die Organisatoren haben das freundlicherweise ohne Punktabzug zugelassen. Damit war die Verbindung zwar nicht perfekt, aber spürbar besser.
Ablegen musste man die Probes an mit Kies gekennzeichneten Punkten. Mehr Punkte gab es, wenn man die Probe in den Kies stecken konnte, ohne dass sie danach umfiel.
Eben das versuchten wir und schafften es auch bei zwei der drei Probes.
Den Stein konnten wir dann auch noch einsammeln. Da wir diesen eh nicht hätten wiegen können, haben wir einfach den erstbesten Stein genommen.

Navigation
Bei der Navigation müssen mehrere Zielpunkte in beliebiger Reihenfolge angefahren werden und es wird die Entfernung zum Zielpunkt gemessen.
Die meisten Punkte gibt es, wenn das ganze autonom geschieht, also man dem Rover nur die Karte und Zielpunkte vorgibt und er sich selbständig dorthin bewegt.
Wie wir kurz vorher feststellen mussten, war das für uns nicht umsetzbar. Lars und Ole hatten am Abend vorher und auch noch am Vormittag lange daran gesessen, leider ohne Erfolg. Darum sind wir alle Punkte manuell und mit Kamera angefahren.
Am Steuer saß Lars und die Kamera wurde von Ole bedient.
Weil die Zielpunkte sehr klein und im Gras nur schwer zu sehen waren, haben wir einen Punkt nicht perfekt erwischt, waren aber dennoch in Reichweite, um die maximale Punktzahl zu erreichen. Alles in allem trotzdem eine erfolgreiche Task.
Team Task
Die meisten waren nun bereit für eine Pause und der Foodtruck war auch schon da, aber wir hatten vorher noch die Team-Task zu bewältigen.
Dafür müssen zwei Teams auf gegenüberliegenden Seiten eines Grabens zusammenarbeiten, um eine Brücke zu bauen und diese zu überqueren.
Unser Partner-Team war Project RED aus Italien. Ihr Zelt war direkt neben unserem, also konnten wir einfach eine Trennwand abnehmen und miteinander kommunizieren.
Leider war der Arm von Project RED zu diesem Zeitpunkt aufgrund eines Defekts nicht mehr einsatzfähig, weshalb wir die Brücke allein bauen mussten.
Da die Rover auf unterschiedlichen Seiten des Grabens standen, konnten wir durch die Kameras von Project RED besser die Distanzen einschätzen, was die Erfüllung der Task sehr vereinfachte. Somit lief die Aufgabe recht flüssig und uns wurde noch etwas zusätzliche Zeit eingeräumt.
Am Ende waren beide Rover auf den gegenüberliegenden Seiten und der Jubel der Zuschauer war groß.
Drone Task
Da unsere Drohne leider noch nicht funktioniert hat, fiel die nächste Aufgabe für uns aus, was zu einer notwendigen Pause und Mittagessen für alle führte.
Trotzdem war es schade, denn der Drone Cage, den die FHNW aufgebaut hat, war einfach großartig.
Recovery Task
Unsere letzte Aufgabe des Tages war es, eine Schaufensterpuppe namens Julia Gagarin zu finden und zu retten. Das Finden erwies sich als einfach, weil sie einen glänzenden Raumanzug trug. Um sie in die vorgesehene Rettungszone zu transportieren, mussten wir ein Seil am Rover einhaken.
Das gelang nach etwas Probieren sogar mit dem robotischen Arm, was uns einige Punkte bescherte.
Sobald Julia Gagarin in der Rettungszone lag, mussten wir uns mit dem Gesundheitsmonitor verbinden.
Eigentlich sollte das per WLAN gehen, bei uns war allerdings nur LAN möglich, was ein paar Punkte Abzug gab. Mit aufgebauter Verbindung konnten wir dann aber einen Server starten und ihren Zustand an die Juroren melden. Insgesamt eine sehr nette und abwechslungsreiche Aufgabe.
Siegerehrung
Nach dieser letzten Aufgabe hatten wir einen Moment um uns zu entspannen und ein Teamfoto zu machen. Recht zügig wurden wir aber gebeten, für die Siegerehrung zu den Zelten zu kommen. Die Sieger wurden von unten nach oben mit den jeweils erreichten Punkten verkündet:
Wir haben es beim Rover Träff 2025 auf den zweiten Platz geschafft, wobei nicht viele Punkte bis zur FROST auf dem ersten Platz gefehlt haben. Herzlichen Glückwunsch an die Gewinner!

Abend
Nun aber wirklich fertig, mussten wir uns in der Teamzone von den Geschehnissen und der prallen Sonne erholen.
Theo, der den ganzen Tag den Arm gesteuert hatte und für viele unserer Erfolge verantwortlich war, war aber schon direkt motiviert, Verbesserungen für den nächsten Arm umzusetzen. Trotzdem haben wir dann den Rover und alles Werkzeug gesammelt und ins Fahrzeug verladen.
Während wir noch Dinge eingeladen haben, wurde ein Kühlschrank auf einer Sackkarre an uns vorbei zur Wiese gefahren. Dort fand nämlich dann das Abschlussgrillen statt.
Rico, der seine Hilfe am Grill angeboten hatte, wurde direkt vollständig dort eingebunden und der Rest versuchte an einem Tisch, aber nicht in der direkten Sonne zu sitzen.
Es wurde geredet, getrunken und gegessen, bis irgendwann die Sonne weg war.
Dann wurden gemeinschaftlich alle Tische, Bänke und Kühlschränke rein getragen, wo die Feier bis in die Nacht weiter lief.
Sonntag
Die meisten von uns gingen kurz nach Mitternacht ins Bett, andere blieben bis um 4 Uhr wach. Alle mussten aber um 8 Uhr aufstehen um zu frühstücken. Das Frühstück wurde sowohl am Samstag als auch am Sonntag von der FHNW organisiert und bestand aus einer Auswahl an verschiedenen Croissants.
Anschließend packten wir unsere privaten Sachen in die Autos, verabschiedeten uns und machten uns auf die lange Heimreise.
Als zusätzlichen Gast haben wir noch ein Teammitglied des FHNW Teams mitgenommen, der in die Nähe von Stuttgart musste. Dadurch konnten wir auf der Rückfahrt leider keinen Bogen um Stuttgart herum machen. In Stuttgart war auch eins der Highlights der Fahrt, als wir auf Grund von interessanter Baustellenumfahrung wieder zu gefühlten Geisterfahrern mit Gegenverkehr auf beiden Seiten wurden.
Das andere Highlight war kurz vor Dresden, als wir über Google Maps einen Stau beim Entstehen sahen und kurz vorher die Ausfahrt nehmen konnten und so einen längeren Aufenthalt ganz kurz vor Dresden vermeiden konnten. Somit sind wir dann gemütlich über die Dörfer gefahren, bis wir wieder im Dresdner Stadtgebiet angekommen waren.
Zu guter Letzt räumten wir den Rover und alles Werkzeug wieder an ihre Plätze in der Uni und verabschiedeten uns noch voneinander.
Alles in allem eine sehr gelungene Exkursion zum Rover Träff 2025. Wir finden dadurch nur noch mehr: Der Rover Träff ist eine wunderbare Ergänzung zum Hauptevent der European Rover Challenge. So kann man einige Monate vor der ERC die Technik testen, Probleme frühzeitig erkennen und noch rechtzeitig beheben. Der Austausch mit den anderen Teams und erste Erfahrung mit den Vorbereitungsprozeduren der Aufgaben sind Gold wert!
Vielen Dank an das Orga-Team und auch an Prof. Wahlen, der den Rover Träff und das FHNW Rover Team akademisch betreut.









































")