CRAB – Critical Design Review (CDR) in Leiden/ESTEC
The Critical Design Review (CDR) is a key milestone in every REXUS/BEXUS campaign. Experts from European space organisations assess whether the technical design of an experiment is mature and ready for use. At the same time, a soldering course takes place in which a team member learns space-qualified soldering - essential to withstand the stresses of flight, such as vibrations and negative pressure, without damage.
Sunday, 11.05.2025 - Arrival and first impression of Leiden
On Sunday, the first team member set off early in the morning from Dresden via Frankfurt and Utrecht to Leiden. Despite an hour's delay, the journey went largely smoothly, and after checking into the hotel there was still time to explore the city centre. Leiden welcomed us with historical flair, numerous canals, old brick buildings and charming bridges - a successful start.



Pictures of Leiden
Monday, 12.05.2025 - Soldering course at ESTEC
After a joint breakfast with initial meetings with other teams, the bus took us to the European Space Research and Technology Centre (ESTEC) of the ESA. The extensive site is located directly on the North Sea coast and is a central location for tests and qualifications for European space missions.
After receiving the access cards, the day started with a tour of the site, followed by the start of the soldering course. The aim was to learn basic soldering techniques and produce clean, reliable solder joints. We used soldering microscopes to analyse our results - even the smallest impurities can be detected this way. An important lesson: thorough cleaning with isopropanol is essential to avoid mistakes later on.
The work was interrupted by clear explanations on the whiteboard, a very good lunch in the canteen and a cosy coffee break. One highlight: each team had brought typical chocolate from their home country - a great opportunity to exchange ideas.
After the end of the course, some of the participants went on a hike through the dunes to the beach. The weather was ideal and we were even able to dip our feet in the cold sea - a great end to the day.



Pictures of the dune landscape

Photo of the Pannenkoeken restaurant
Tuesday, 13.05.2025 - Advanced soldering course and team arrival
On the second day of the course, we focussed on more challenging tasks, such as soldering surface mounted devices (SMD). These components sit directly on the circuit board and require high precision - especially when holding with tweezers and soldering at the same time. It is crucial that a small air cavity remains under the component in order to comply with aerospace standards.
In the further course, there was an insight into the technique of tinning using a solder bath, which makes subsequent soldering much easier.
The rest of our team arrived in Leiden in the early evening. Together we explored the city again and returned to the Pannenkoeken restaurant - this Dutch speciality had to be shown to the others, of course. We then worked together on the presentation for the CDR.
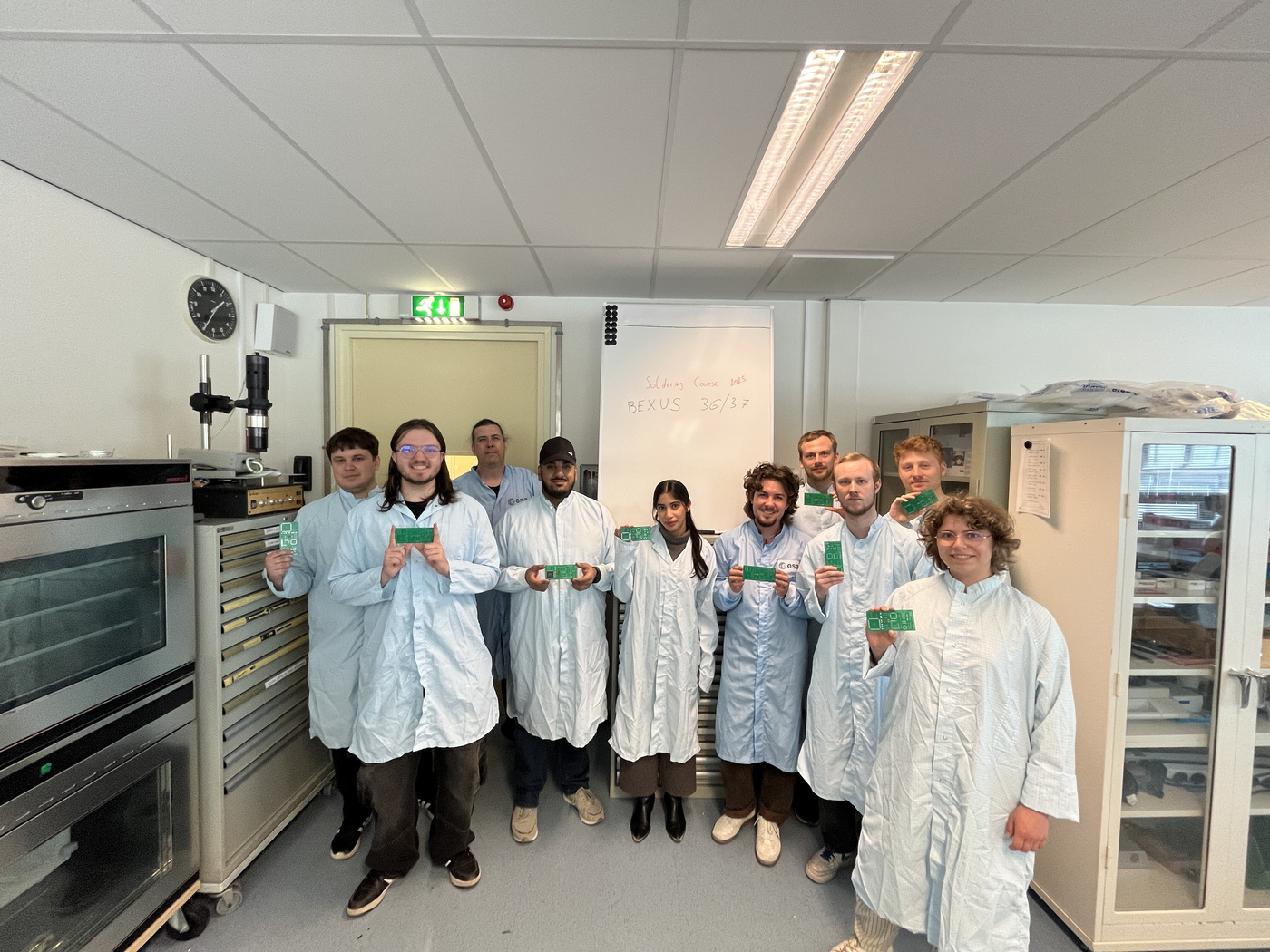
Final team photo soldering course (Credit: ESA/Maximilian Nürmberger)


Photos from Leiden
Wednesday, 14.05.2025 - Excursion to Amsterdam
At breakfast, we watched the hustle and bustle on the crossroads directly in front of the hotel with great interest. We had decided to take a trip to the capital, Amsterdam, on our day off. Equipped with a return ticket, we travelled about 40 minutes by Intercity train to Amsterdam Centraal.

Amsterdam Central Station
Leaving the station, we had our first view of the city centre of Amsterdam. After a brief orientation, we headed straight towards Dam Square, where the Royal Palace, the National Monument to the Fallen of the Second World War and the New Church are located.
We continued along the first canals and the Neumarkt to the Sint Antoniessluis, where there is a beautiful view over a canal towards the harbour basin.

Sint Antoniussluis
We then walked on to this and saw the Nemo Science Museum and the building fronts of the Oosterdok. We walked over the museum harbour, where a historic three-master is moored, and past the museum over a bridge to the Oosterdok.

Historic three-master
To our excitement, part of this bridge was a drawbridge and shortly after we crossed it, a ship passed through so that we could observe the drawbridge in action from close up.

Oosterdok
We finally returned to the main railway station via Oosterdock and started our second tour of the city. This began with the search for something to eat - we had decided on chips. The choice was almost endless, as restaurants, snack bars, bakeries and the like were lined up in the alleyways.

Alley in Amsterdam
Finally, we ended up at Manneken Pis Damrak with the supposedly best fries in Holland. We then ate them sitting next to a golden bull in front of the Amsterdam Stock Exchange on Beursplein.
Strengthened, we walked on and were back at Dam Square, but this time we walked in the other direction past the New Church and the Magna Plaza shopping centre in the canal belt to the Anne Frank House, but you can only get in there if you order tickets in advance. We continued along and over the canals and finally stopped at Café Hegeraad on Noordermarkt next to the Van Gogh and Rembrandt Museum.

Grachte
There we reflected on the trip over coffee and cake until we finally made our way back to the railway station and returned to Leiden. In the evening, we went back to the city centre of Leiden to get some kebabs for dinner. Back at the hotel, we rounded off the day by watching a film (Master and Commander) in our room.
Thursday, 15.05.2025 - Workshop day at ESTEC
After breakfast, we used the morning to finalise the presentation. A good decision - it meant we could tackle the upcoming CDR without any pressure. Once we arrived at ESTEC, the other team members collected their badges before going through security to the ERASMUS building, the venue for the CDR.
The day consisted of several programme items: Presentations on testing and verification, information on the campaign schedule in Sweden, discussions on possible interference between the experiments and finally a session on the arrangement of the experiments on the nacelles.

ERASMUS High-Bay
In the Ask the Experts round, we exchanged ideas with various experts and received important tips and advice for our experiment.
In the evening, all the teams had dinner together in a beach restaurant. The 3-course menu and the conversations with other groups made the evening another highlight. A walk along the beach at sunset rounded off the day in an atmospheric way.

Conclusion on the beach
Friday, 16 May 2025 - CDR Day at ESTEC
As our typical breakfast table was already occupied, we had to adjust our routine a little, but we didn't let that put us off our stride. Our CDR was at 10:30, which gave us enough time to have a leisurely breakfast and still definitely be on time.
After a now familiar bus journey through Leiden, we arrived at ESTEC. On the way to the Erasmus building, we mainly talked about what we still had to see on campus and what we needed photos of.
The CDR was in the so-called Erasmus Earth Room, which is directly adjacent to the High Bay. As the previous team was still inside, we briefly put our things in the High Bay, where we had also sat yesterday. Our team meeting was surprisingly short, however, because we started straight away. Merle waved us in and we sat down at a U-shaped row of tables. We were joined by experts from DLR, SNSA, ESA, ZARM and other space organisations. After getting to know each other, we gave our presentation.

Final photo after the CDR
Afterwards, there were questions from the experts, especially about the previously submitted documents, but also in relation to the presentation. The whole thing was very structured and you could really feel the accumulated professionalism and experience in the room. It went from a discussion about our broadly defined objective to mechanics, which had already undergone changes in discussions the day before, to lasers, electronics, thermal design, software, verification and testing and finally to such simple things as the location of our telescope. In between a lot of constructive criticism, there was occasional praise for good documentation or elegant solutions.
Shortly before the end of the planned two hours, we were asked to leave the room so that the experts could discuss what had been discussed. The main issue was probably the decision between a pass and a conditional pass, which would mean that we would have to provide a few more explanations. Theoretically, we could also get a fail, but that would probably require a lot of effort.
While we waited, we looked at one of the exhibits in the High Bay. Shortly afterwards we were told that we had passed, although it was still unclear whether it was a full or conditional pass (about a week after the CDR we were told that we had been given a pass and therefore didn't need to submit any further explanations).
Erleichtert nutzten wir die Zeit, um noch ein paar Fotos im Columbus Modul Nachbau zu machen und dann auch zur Mensa zu gehen.
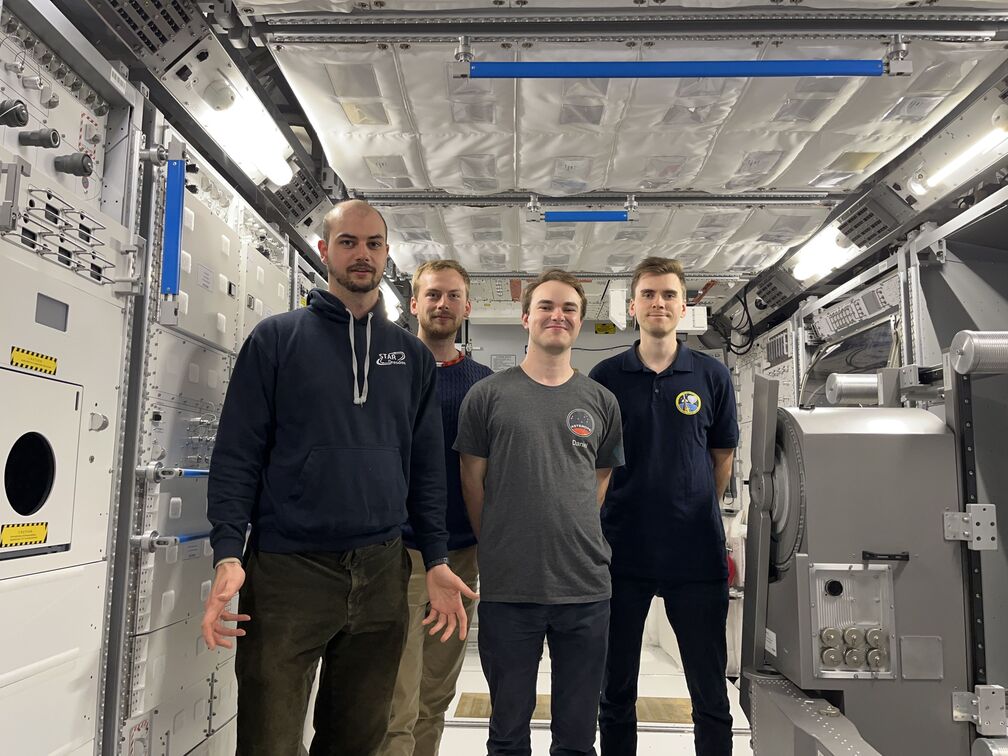
Young space travellers in their natural habitat - the space station
The ESA canteen is in a building that looks like several circus tents stuck together, but it's all steel construction. Inside, a lot has been done to protect against noise, which creates a pleasant atmosphere despite the large number of people. As it was the first time we'd all been there, we were a little sluggish, but in the end everyone had something to eat and we made plans for the afternoon.
The weather wasn't nice enough to go to the beach, so we opted for the ESA Space Expo, which is adjacent to ESTEC. The exhibition is obviously very family-friendly and very stylish. There was also a model of the Columbus module, but it was far less realistic than the one in the High Bay. For the longest time we stood under a real rocket engine, which was even cut open at certain points to explain its inner workings.
After about an hour, we went to the merch shop and took the bus to the hotel.


Simulator at the Space Expo
Saturday, 17.05.2025 - Return journey to Dresden
The return journey to Dresden was scheduled for Saturday. A pleasant train connection took us via Utrecht to Frankfurt and then to Dresden. We used the journey to evaluate the week and the review, discussed how we should proceed and had the opportunity to discuss initial changes.
Many thanks to DLR, SNSA, ZARM and all other space institutions of the REXUS/BEXUS programme who made this week possible. We have learnt a lot and are looking forward to the coming months until the campaign!


























































")








































































































