– ist der vierte Rover von STAR Dresden für die ERC – die European Rover Challenge.
Die Challenge
©STAR Dresden e.V.
Die ERC ist ein internationaler Wettbewerb, welcher jährlich in Polen stattfindet. Seit 2024 wird dieser an dem Campus der AGH University of Kraków ausgetragen.
Teams aus der ganzen Welt haben die Möglichkeit, ihren Rover in mehreren verschiedenen Aufgaben auf dem sogenannten Mars-Yard gegeneinander antreten zu lassen. Auf ca. 1500 m² wird jedes Jahr eine andere Region des Mars nachgebaut. Die Aufgaben sind dabei nicht aus der Luft gegriffen, sondern basieren auf internationalen Plänen für die Weltraumrobotik und die bodengebundene Exploration.
Die aktualisierten Regeln für 2026 wurden vor kurzen veröffentlicht und wir stecken schon voll in der Entwicklung für den September.
Die Aufgaben
Navigation Task
Hier muss der Rover vier vorgegebene Punkte möglichst autonom ansteuern. Dabei gibt es Abstufungen, bei denen man sich z.B. entscheiden kann, einige Punkte einzubüßen und dafür GNSS nutzen zu dürfen. Viele Rover nutzen Lidar oder ähnliche Sensoren, um die Umgebung zu erkennen und sich darin zu orientieren. Falls diese Sensoren komplett streiken sollten, kann ein Team auch mit Video Streams manuell fahren. Dafür gibt es allerdings auch die wenigsten Punkte.
Separat vom fahrenden Rover soll auch eine Drohne zwischen mehreren Punkten hin und her fliegen. Dabei darf sowohl eine handelsübliche off-the-shelf Drohne genutzt werden, als auch eine Eigenanfertigung. Auch hier gibt es die meisten Punkte für Autonomie, wofür man mit einer eigens gebauten Drohne natürlich mehr Möglichkeiten hat.

Science Task
Diese Aufgabe besteht aus drei Teilaufgaben. Der Zweck dieser Aufgabe ist es, die typischen wissenschaftlichen Aktivitäten des Rovers auf der Marsoberfläche nachzustellen.
Der erste Teil, der unmittelbar nach der „Landung“ auf der Oberfläche des Roten Planeten durchgeführt wird, ist die Erkundung der Umgebung. Dabei fährt man auf dem Mars-Yard und macht Fotos von auffälligen Objekten, die von den Veranstaltern verteilt wurden. Außerdem soll der Rover eine Brücke auf die andere Seite eines kleinen Grabens bauen und benutzen.
Dadurch erreicht er einen Bereich, wo zwei Bodenproben entnommen werden sollen. Die erste Probe ist von der Oberfläche, also Steine und Sand, die dann gewogen werden müssen. Als Zweites muss ca. 30 cm tief in den festen Sandboden gebohrt und ein der Bohrkern vorsichtig entnommen werden.
Die letzte teilaufgabe fordert die Teams auch abseits vom Marsyard, denn hier werden vor der Challange ein Planning Report und nach der Aufgabe ein Sience Reports gefordert das erfordert ein schnelles und effizientes auswerten der gesammelten erkenntnisse und Daten. Dabei stellt man im vorhinein eine eigene wissenschaftliche Hypothese auf und muss diese mit einem geeigneten Experiment auf dem Marsyard untersuchen.
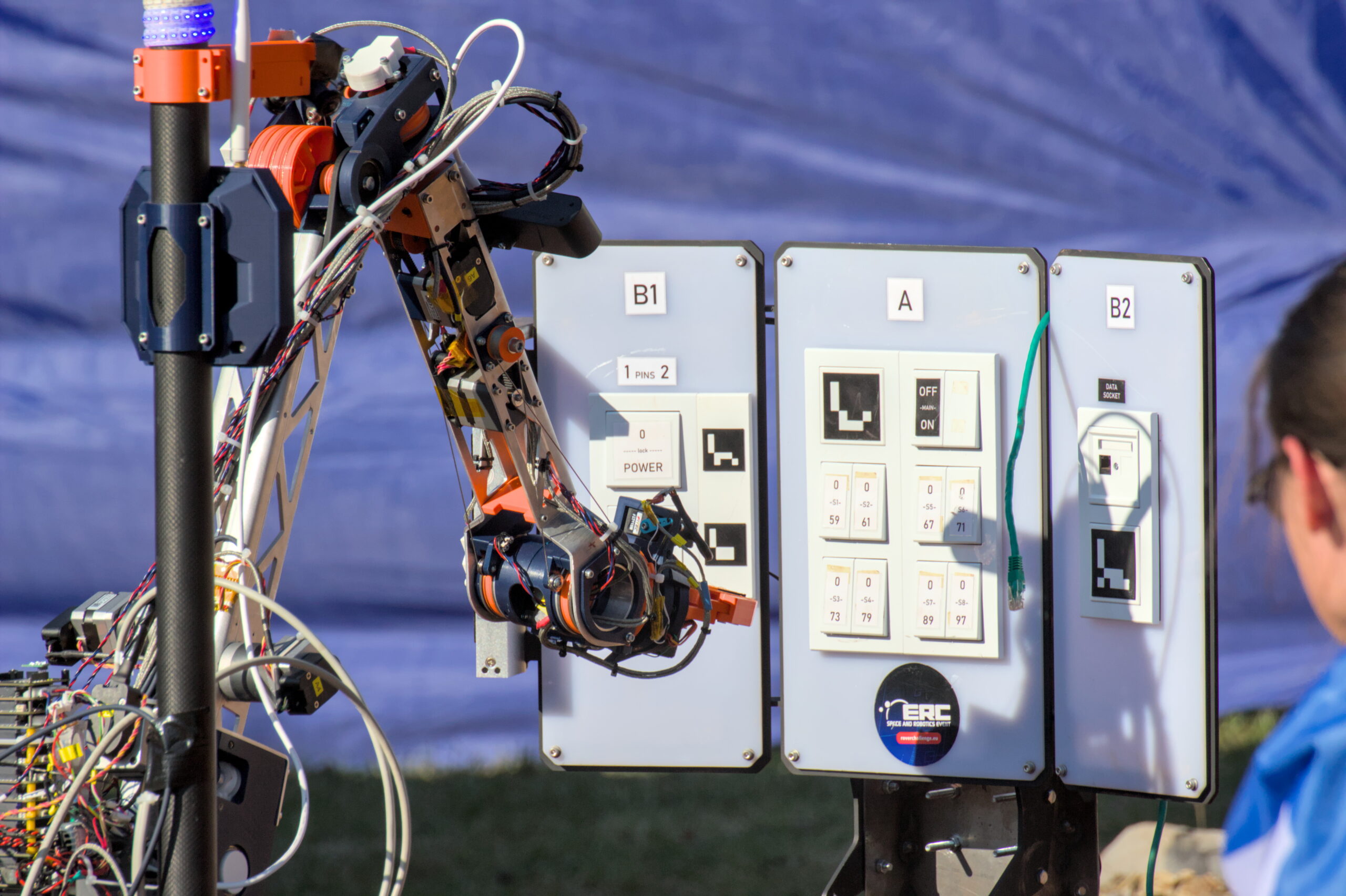
Maintenance Task
Während der robotische Arm für die vorherigen Aufgaben eher eine Nebenrolle gespielt hat, ist er hier unabdinglich. Auf dem sogenannten Maintenance Panel müssen Schalter in einer bestimmten Reihenfolge gedrückt, eine Steckdose geprüft und ein schweres Metallstück an der Seite befestigt werden. Um möglichst viele Punkte zu bekommen, sollte der Arm das selbständig, also autonom machen. Um das zu unterstützen, sind am Panel sogenannte ArUco Marker angebracht.
Probing Task
Über den Mars verteilt sind sogenannte Probes, die Sonden für Umweltmessungen darstellen sollen. Während dieser Aufgabe sollen fünf Teams gleichzeitig mit ihrem Rover jeweils drei Probes einsammeln. Die meisten Punkte bekommt das Team, welches als Erstes mit allen Probes wieder am Startpunkt ist.
Presentation Task
Um eine Missionsanalyse nachzustellen, wird jedes Team einen Vortrag halten. Nach einer Vorstellung der Teammitglieder und des Rovers, sollen potenzielle Vermarktungsideen von verbauten Techniken im Rover vorgestellt werden.
Zum Schluss gibt es eine Diskussionsrunde mit den Organisatoren der ERC.
Was bisher Geschah…
ELECTRA:
Nachdem zwei Mitglieder 2019 als freiwillige Helfer bei der ERC vor Ort waren und sich den Wettbewerb und die Teams mit ihren Rovern anschauen konnten, ging die Entwicklung des ersten Marsrovers aus Dresden los. Nach einem Jahr Entwicklung war ELECTRA fertig und es ging wieder nach Kielce. Die Geschichte mit vielen plötzlichen Herausforderungen aber auch tollen Momenten kann in dem dazugehörigen Blog nachgelesen werden. Nach einigen spannenden Tagen war es dann offiziell – das Team der STAR Dresden hatte den 5. Platz in der Gesamtwertung aus über 50 Teams errungen!
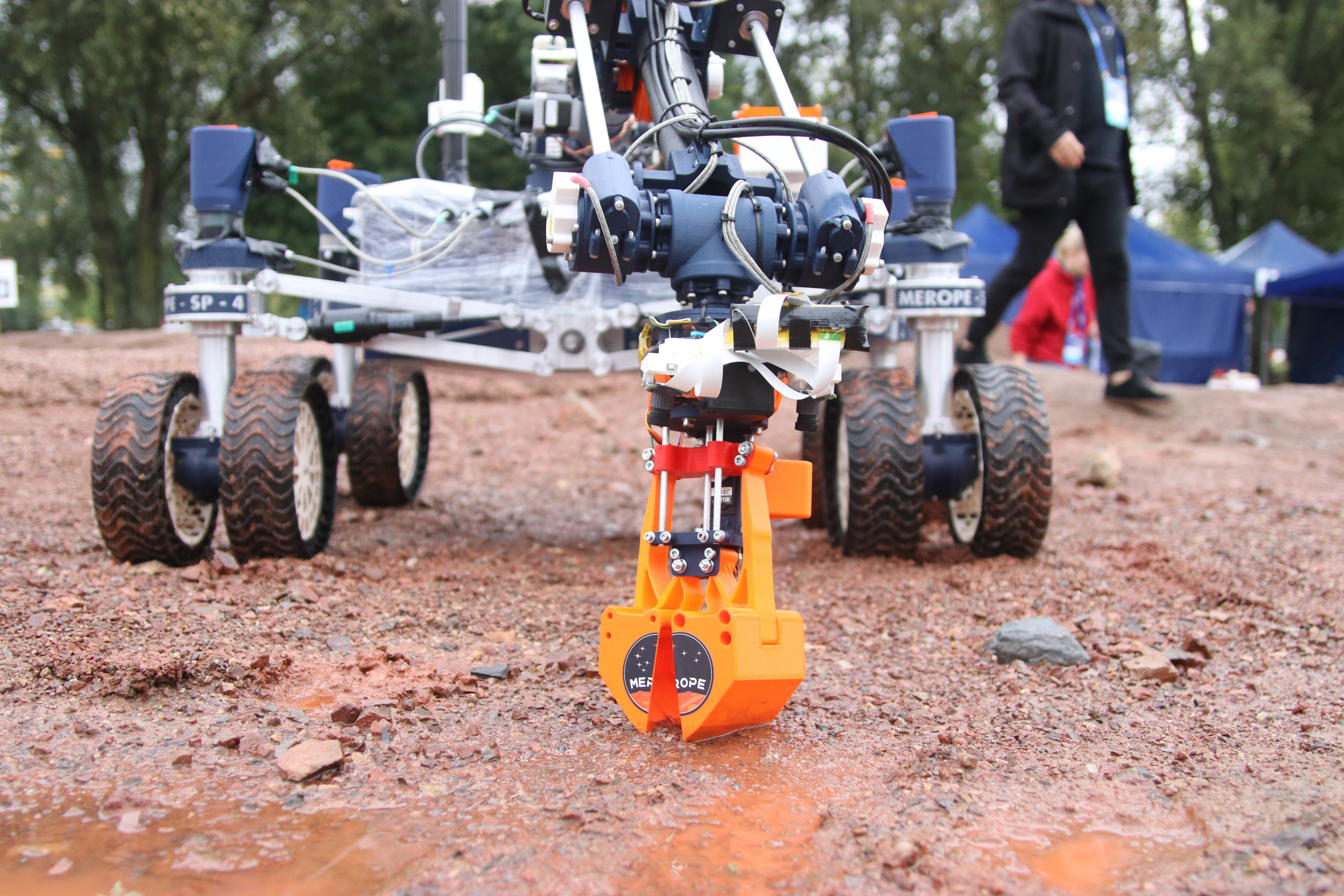
MEROPE:
Für das folgende Jahr sollte mit MEROPE ein völlig neuer Rover entstehen. Mit vielen lessons learned wurde ein sehr stabiler Rover gebaut, der auch im Regen gut funktioniert hat. Mit all diesen Verbesserungen landete das Team wieder auf dem 5. Platz, weil auch die Konkurrenz nicht geschlafen hat.
Auch hierzu gibt es einen Blog Beitrag, der die Ereignisse der Reise und eigentlichen Challenge nacherzählt.
TAYGETA:
Der dritte Rover TAYGETA sollte wieder ein neu gebauter Rover sein, auch wenn viele Designs stark von MEROPE inspiriert wurden.
Leider war TAYGETA geplagt von Problemen, wie einem fehleranfälligen Fahrsystem und sogar einem PCB, was in Flammen aufging. All das kratzte zwar an der Motivation, aber der Teamgeist ist stets stark geblieben.
ASTEROPE
Nachdem 13. Platz mit Taygeta im Jahr 2023 ging es zurück an das Reißbrett. Da das Gewichtslimit in 2023 erhöht wurde konnten wir ASTEROPE größer und Robuster auslegen und die Entwicklung dauerte allerdings länger als gedacht also wurde entschieden, dass wir noch mehr Entwicklungszeit in Asterope stecken und auf der ERC 2024 nochmals mit einer dann verbesserten Merope antreten mit ihr gelang es uns auf den 4. Platz zu landen und damit nochmals einen Schritt näher in richtung des Podiums zu gelangen
Nach dieser Stärkung der Moral war die Motivation für 2025 groß, sodass wir zeitnah mit der Fertigung beginnen konnten. Diese zog sich über das gesamte Jahr hinweg, und erst zwei Wochen vor dem Wettbewerb sahen wir ASTEROPE tatsächlich zum ersten Mal fahren.
So ging es erneut nach Krakau. Mit nur wenig Testzeit mussten wir uns voll darauf verlassen, bei der Auslegung und dem Zusammenbau keine Fehler gemacht zu haben. Und tatsächlich wurden wir mit einem nahezu perfekten Wettbewerb belohnt. Lediglich unsere Drohne bereitete größere Probleme, die wir jedoch durch starke Leistungen in den anderen Tasks fast vollständig ausgleichen konnten. Am Ende sicherten wir uns damit den 2. Platz sowie den Award für den besten Sampling Task und den besten Science Report.